Tesla 频上热搜的马斯克 被“高估”的特斯拉( 二 )
文章图片
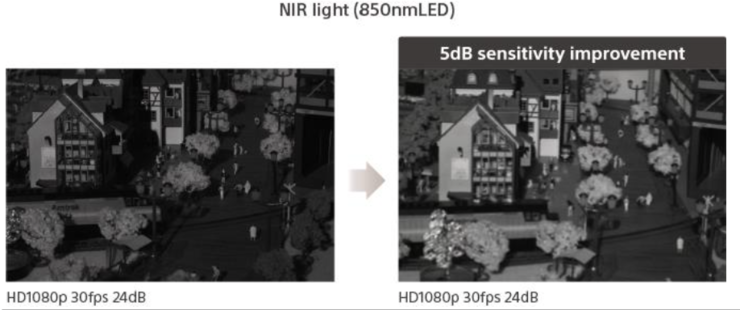
但是视觉感知存在的问题是 , 摄像头会受到诸如天气、阳光等因素的影响 , 在一些特殊场景下可能识别出错 。由于主要依靠视觉感知来进行决策控制 , 即便雷达在识别到潜在的物体 , 那么整个系统也倾向于主摄像头传感器的判断 , 从而导致事故 。
2016年 , 特斯拉在美国弗罗里达发生一起事故 , 就是因为摄像头没有识别到处于车辆前方的卡车车厢 , 雷达已经感应到 , 但系统基于摄像头误判为一块路牌 , 进而引发车祸 。
业内通常认为 , 视觉感知和雷达能够适用比较普通的行车环境 , 但是最优的解决方案 , 是使用激光雷达 。激光雷达具备高精度、高分辨率的特点 , 能建立起3D感知图 , 与摄像头和超声波传感器互为补充 , 识别更为精确的行车环境 。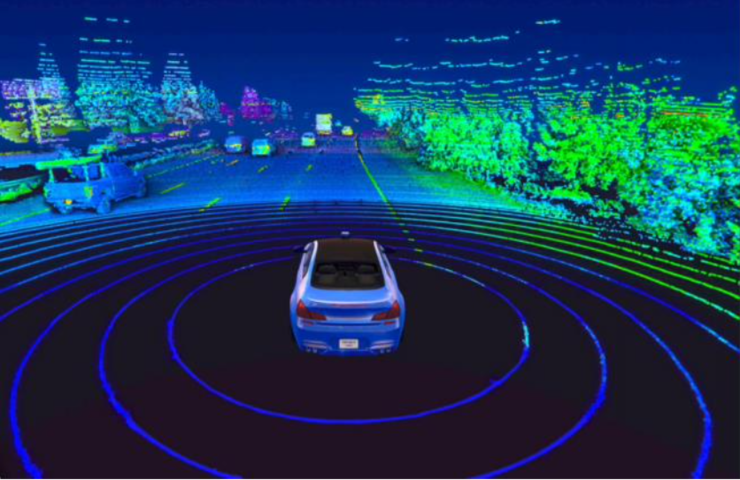
文章图片
不过特斯拉完全没有配备激光雷达的意思 , 作为视觉感知派的拥趸 , 马斯克不止一次公开调侃激光雷达:“车辆上的雷达方案是极其愚蠢的 , 任何使用激光雷达方案的人或者企业最后都将失败 , 他们大费周章的使用这些昂贵的传感器本身就是一个麻烦 。”
这是因为激光雷达成本太高 , Waymo使用的 Velodyne 64线的激光雷达 , 单个售价高达7.5万美元 , 而且有价无市 。如果特斯拉采用激光雷达 , 那么成本无疑会大幅提升 , 消费者很难会承受如此高昂的价格 , 所以特斯拉坚持搞视觉算法 。
除了在硬件感知上的问题 , Autopilot的软件也存在一些问题 。雷锋网了解到 , 特斯拉在设计Autopilot的时候 , 理念是“先硬件 , 后软件” , 硬件会随着车型的更替而迭代 , 但软件会基于原有的OTA平台更新固件 , 实现升级 。
特斯拉之所以能够实现更新升级 , 关键在于Autopilot的传感器会实时将数据传递给特斯拉的中央服务器 , 通过大量真实的数据来对算法进行优化 , 从而完善Autopilot在特殊场景下的信息处理和控制 。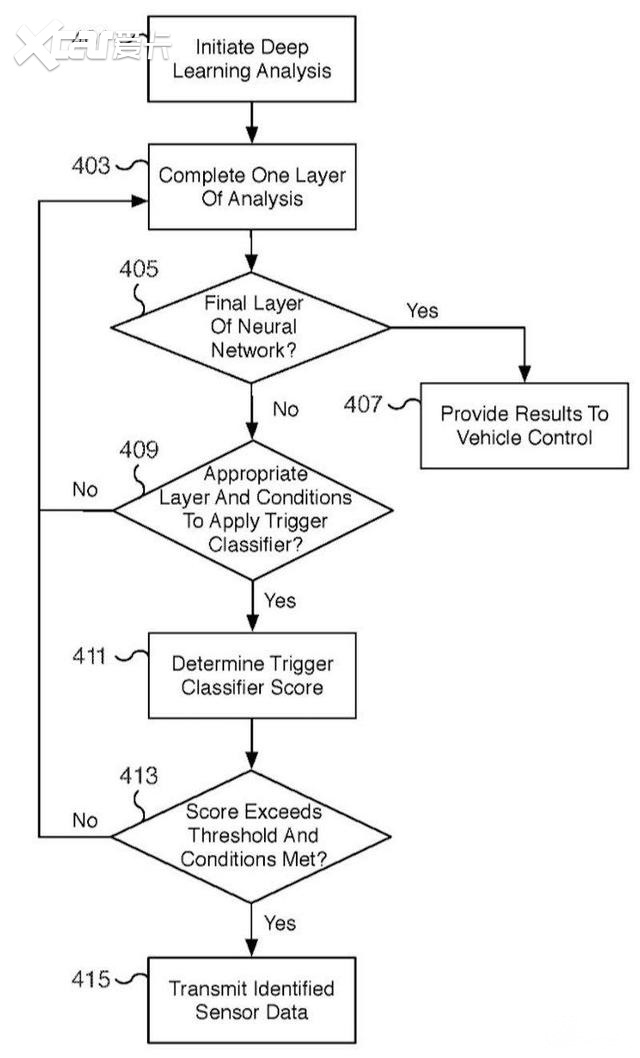
文章图片
换句话说 , 每一次新场景 , 或是行车事故 , 数据都会被传到特斯拉的服务器 , 成为分析数据 , 以不断优化Autopilot 。Autopilot的不断迭代 , 已经说明 , 不论是从硬件感知 , 还是软件算法上 , 这都不是一个全自动驾驶系统 。
Autopilot:可用但不完全可靠
从Autopilo Hardware2.0开始 , 马斯克一直在鼓吹Autopilot的自动驾驶水平 。在最初的特斯拉中国网站上 , Autopilot的翻译显示为“自动驾驶” , 不过在2016年的一场特斯拉车祸之后 , 悄悄改成了“自动辅助驾驶” 。
除此之外 , 马斯克也在多个场合 , 包括在去年的世界人工智能展上 , 暗示搭载FSD系统的Tesla车辆“已经相当接近Level 5” 。作为Autopilot的升级版 , FSD Beta在硬件和算法上都进行了优化 , 但造价成本更高 , 并未完全投入使用 , 且FSD Beta也并没有达到L5的水平 。
事实上 , 目前并没有任何一家汽车厂商宣布实现全自动驾驶 。不论是新能源汽车厂商还是传统车企 , 许多都已能达到L2的自动驾驶水平 , 比如特斯拉的Autopilot , 蔚来的NIOpilot , 长城的i-Pilot 。
据报道 , 自宣达到L3水平的车企有两家:奥迪(A8)和丰田(Highway Teammate) 。值得一提的是 , 这两家车企宣布达到L3水平的车型 , 均配备了前置激光雷达 。
一直以来 , 特斯拉把电动车配置的辅助驾驶功能称之为“Autopilot”(英文意思是自动驾驶)和“完全自动驾驶” 。一些专家认为这会给消费者造成误导 , 以为电动车能够自己完成操控 , 而听信马斯克“谎言”导致的事故也不在少数 。在特斯拉的老家——加州 , 政府对于特斯拉的自动驾驶水平也持警惕态度 。
5月12日 , 美国加州一名特斯拉车主因鲁莽驾驶和违抗治安官命令被逮捕 。
推荐阅读







- 发射 金星上有生命吗?NASA一口气发射2个探测器,谜题即将揭晓
- mbc 韩网热议!韩国上半年SBS和tvN进行激烈的战斗!下半年JTBC也加入?
- 养老金 2021年辽宁养老金上调,看看方案是什么?工龄37年能涨多少?
- 上海市 2021年06月03日上市公司公告
- 稀土 在我国发觉比希土还有价值的商品,储藏量全世界第一,使用价值达到上千亿
- Tesla 特斯拉维权女车主首度公开事故前30分钟数据 将依法起诉
- 蔡徐坤 “保护泉水”太难了,沙溢放弃表情管理,蔡徐坤惊现高频率抖腿
- IT 贾跃亭和他的 FF 即将敲钟上市 距离回国又进一步
- 创造营2021 蒋敦豪曝光《创4》内幕,揭开选秀基本规则:上位圈不和下位圈玩
- 陈立农 黄明昊陈立农上快本,黄明昊对陈立农的称呼亮了,网友:好真实