关于激光雷达,看这一篇就够了
【太平洋汽车网 技术频道】1638年,伽利略提着一盏灯站在山头上,默默的把灯盖了起来......
远处的另一个山头上,他的助手在看到灯灭的一瞬间也把自己手上的灯盖了起来。伽利略想用这样的办法计算出光的速度。可惜他不仅没能测出光速,甚至没能判断出光速是不是无限的,对于当时的技术手段,光速实在太快了。
文章插图
不过伽利略的想法并没有错。今天我们已经能测出一束光射出,遇到物体后返回的精确时间差,同时我们也知道精确的光速,于是这个办法就可以用来测量发射点到目标物体的距离,这种方法叫做“飞行时间”,简称TOF。
今年开始,突然冒出一大堆配备激光雷达的量产车,正是利用TOF测距,通过激光感知周边的三维环境。激光雷达究竟有什么用让这么多品牌趋之若鹜,有为什么直到今天才突然被厂商如此垂青?
激光雷达为什么会“蹿红”近几年来,自动驾驶的概念越来越被频繁的提及,而自动辅助驾驶技术也在快速的发展。随着自动驾驶辅助系统在量产车型上的需求与日俱增,相关的感知硬件也得以快速发展。
我们平时开车需要用眼睛观察路况,而自动(辅助)驾驶便是通过感知硬件来感知周围的路况。目前汽车上应用到的感知硬件包括但不限于:摄像头、毫米波雷达、超声波雷达、激光雷达以及V2X相关硬件等。
文章插图
作为一种新兴崛起的感知硬件,激光雷达的原理前面也有简单提及,就是通过发射激光来测量周围事物的距离。发射的激光线束越多,感知的区域和细节就越多,而通过让反射的激光转动扫描,就可以得到一片区域的三维形态。
我们将激光雷达和其他感知硬件做一个简单的对比,其中超声波雷达成本极低,但感知距离较近,主要用于停车辅助;而V2X还处在起步阶段,尚未得到大量的应用,这两者不做比较。
摄像头是目前最主流的自动驾驶感知硬件,类似人眼看世界,系统算法会自动分析图像并找出其中的各种事物。双目摄像头还可以像人眼一样通过夹角分析出前方障碍物的距离。不过视觉十分依赖算法,而算法需要海量的数据进行训练,对于后来者有极高的门槛。此外,摄像头受逆光、能见度等环境因素影响颇大,识别准确率在不同环境下会有较大波动。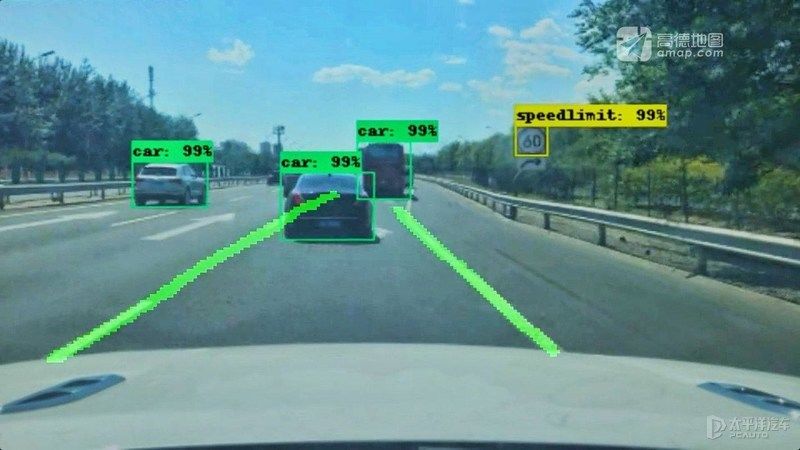
文章插图
毫米波雷达在汽车上的应用更久,ACC自适应巡航就是靠毫米波雷达实现的。目前毫米波雷达成本可控,同时毫米波雷达在恶劣天气下也可以正常工作,并且可以更直接的判断其他车辆的速度,因此在自动(辅助)驾驶中应用广泛。但毫米波雷达识别精度有限,难以判断障碍物的具体轮廓,目前主流的毫米波雷达甚至无法判断垂直高度信息,对小尺寸障碍物的判断更加模糊。
上海车展期间,华为发布了其最新的可装车的4D成像雷达,其实也是一种毫米波雷达,不过在精度上进行了大幅优化。在成像精度上有了大幅提升,不仅可以勾勒出车、人等障碍物的大致轮廓,甚至可以越过前车探测前方两台车的速度与距离。相应的,成本也有较大升高。且毫米波雷达对金属敏感,对非金属探测能力较弱的特性也一样存在。
接下来就是激光雷达了,相比前两者,激光雷达可以准确的感知周边环境的三维信息,探测精度在厘米级以内。这就使得激光雷达能够准确的识别出障碍物具体轮廓、距离,且不会漏判、误判前方出现的障碍物。相比前两者目前主流水平,激光雷达普遍的有效探测距离也更远。
文章插图
当然缺点也很明显,一个是贵,早期的机械式激光雷达动辄几十万上百万,如今华为、大疆等将激光雷达的价格控制在了一千美元以内,已经达到了实用的程度,但相较其他感知传感器依然显得十分昂贵。
另外,激光雷达对工作环境要求也很高。我们知道,光和电磁波一样由自己的波长,而波长越短走的线路越直,绕过障碍物的能力也越弱。毫米波雷达发射的电磁波波长在1-10mm之间,而目前主流的激光雷达发射的激光波长为905nm和1550nm。激光的优势在于聚焦,很长的距离上都不会发散,但这样就无法绕过障碍物,在雨雾、风沙等天气时会受到极大的干扰,甚至无法工作。
因此,激光雷达不能作为单独的感知硬件,但激光雷达与毫米波雷达、摄像头等进行数据融合,可以得出更全面的周遭环境信息,对自动(辅助)驾驶的路径规划和安全性有着极大的帮助。
推荐阅读







- 徐瑞哲 造中国天眼、发超强激光、开采可燃冰,年纪轻轻有没有科研经费、生儿育女压力
- Tesla 雷达终结者,这回特斯拉连毫米波雷达都省了
- 雷达 海洋深处的眼睛——激光雷达
- 送男朋友啥篮球鞋比较好
- 天文 山海经中为什么那么多异人异兽为什么还有关于天文观测台的记录
- 科普中国-科学原理一点通 海洋深处的眼睛——激光雷达
- Tesla 坚持不用激光雷达的马斯克图啥?
- Tesla 取消了雷达的特斯拉还安全吗?美权威机构近期或重测Model 3
- 天体 平常我们看到的关于太阳系图片,天体之间的比例是真实的吗
- 陨石 研究称地球上的小行星撞击坑提供了关于火星陨石坑的线索