关于激光雷达,看这一篇就够了( 五 )
正因如此,905nm激光的探测距离也会受到限制。
● 1550nm
相比905nm激光,1550nm激光会被人眼晶状体和角膜吸收,不会对视网膜产生伤害,因此1550nm激光雷达可以发射更大功率,探测距离也可以做到更远。
但是1550nm激光雷达无法采用常规的硅吸收,而需要用到更加昂贵的铟镓砷(InGaAs)材质,因此在价格上较905nm激光雷达会贵出很多。
其他分类除了以上提到的分类,根据测距原理的不同,激光雷达还可以分为飞行时间(dTOF)激光雷达和相位偏移(iTOF)激光雷达,飞行时间(dTOF)激光雷达采用非连续的脉冲激光,根据发射和接收的时间差直接算出距离,正式本文开头提到的原理,也是目前车载激光雷达最常用的测距原理。而相位偏移(iTOF)激光雷达采用的发射特定频率的调制的激光,通过计算相位差间接计算出距离。dTOF理论上其精度不随距离增加而下降、抗干扰强、功耗较低,但工艺相对复杂;iTOF精度偏低、抗干扰性较弱、功耗较大,但工艺相对简单。
从光源分类,常见的激光雷达包括边缘发射激光器、垂直面激光发射器、光线激光发生器等等。
文章插图
另外,机械式激光雷达也经常提及光源线束,即有多少组发射和接收器,线束越多形成的点云越密集,探测精度也越高。不过,除了一维转镜,二维转镜和MEMS微振镜激光雷达可以进行左右上下扫描,而棱镜激光雷达会在中心区域重复多次扫描,厂家一般会发布区域内等效线束数据,而非发射和接收器数量。
此外,根据激光雷达四大要素:测距原理、光束操作方式、光源、探测器的不同还可以有更多的分类依据,这里就不再一一列举。
激光雷达还有更多用处目前,汽车领域受到广泛关注的是用于自动(辅助)驾驶感知硬件的车载激光雷达。不过激光雷达在汽车领域的运用远不止于此。
随着自动驾驶相关概念的兴起,高精度地图也开始越来越受到关注和普及,在高精度地图数据的采集过程中,激光雷达强大的3D建模能力能够得到极大的发挥。
而随着搭载激光雷达的量产车逐渐普及,实时上传的众包高精度地图概念也被提出。不过由于高精度地图涉及国家机密等原因,目前法规下这一概念尚不能实现。不过,在停车场等非敏感地带通过激光雷达进行众包数据采集的路线也正在探索中。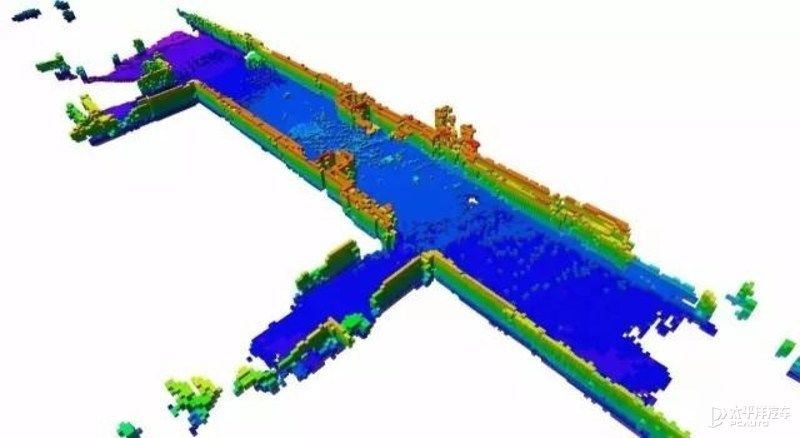
文章插图
另外,视觉摄像头相较雷达的一大优势在于包含了颜色信息,不过激光雷达采集的数据也并非单纯只有“一种颜色”。激光雷达对于不同反射率的物体有不同的感知,而道路车道线、交通标识等多采用高反光率的涂层。视觉目前探测距离,识别能力等有诸多限制因素,因此通过激光雷达识别车道线等也是一种极佳的技术路线。
而目前尚未大规模普及的C-V2X技术中,路侧感知设备也在积极探索对激光雷达的运用。
凭借高精度的感知能力,固定在路侧的激光雷达可以更准确的捕捉到车辆视觉盲区的行人等潜在障碍,通过V2X技术将视野盲区的潜在风险“告知”车辆,可以有效的避免“鬼探头”,有遮挡交叉路口侧翻车辆等难以主动避免的安全隐患。
文章插图
其实,路侧的激光雷达等V2X硬件并非单纯的为路上的汽车服务,还可以在安防、智慧城市等更多领域发挥作用。而激光雷达也不止在交通领域发力,前不久发布的iPhone12 Pro也配备了激光雷达,在VR游戏,室内建模等更多的领域有着很大的潜力。
【关于激光雷达,看这一篇就够了】随着激光雷达在自动(辅助)驾驶汽车上越来越多的被搭载,激光雷达也从测绘这样的小众市场进入了大众消费市场,产业链逐步成熟,开始出现在了更多的领域,未来将有望出现在我们生活的更多场景中,也可以发挥出更大的作用。(文:太平洋汽车网 郭睿)
推荐阅读







- 徐瑞哲 造中国天眼、发超强激光、开采可燃冰,年纪轻轻有没有科研经费、生儿育女压力
- Tesla 雷达终结者,这回特斯拉连毫米波雷达都省了
- 雷达 海洋深处的眼睛——激光雷达
- 送男朋友啥篮球鞋比较好
- 天文 山海经中为什么那么多异人异兽为什么还有关于天文观测台的记录
- 科普中国-科学原理一点通 海洋深处的眼睛——激光雷达
- Tesla 坚持不用激光雷达的马斯克图啥?
- Tesla 取消了雷达的特斯拉还安全吗?美权威机构近期或重测Model 3
- 天体 平常我们看到的关于太阳系图片,天体之间的比例是真实的吗
- 陨石 研究称地球上的小行星撞击坑提供了关于火星陨石坑的线索