飞行约581秒二子级游动发动机关机 , 紧接着船箭分离 , 神舟十三号载人飞船进入近地点200公里远地点356公里的预定轨道 , 至此火箭发射段工作圆满完成 。

文章图片
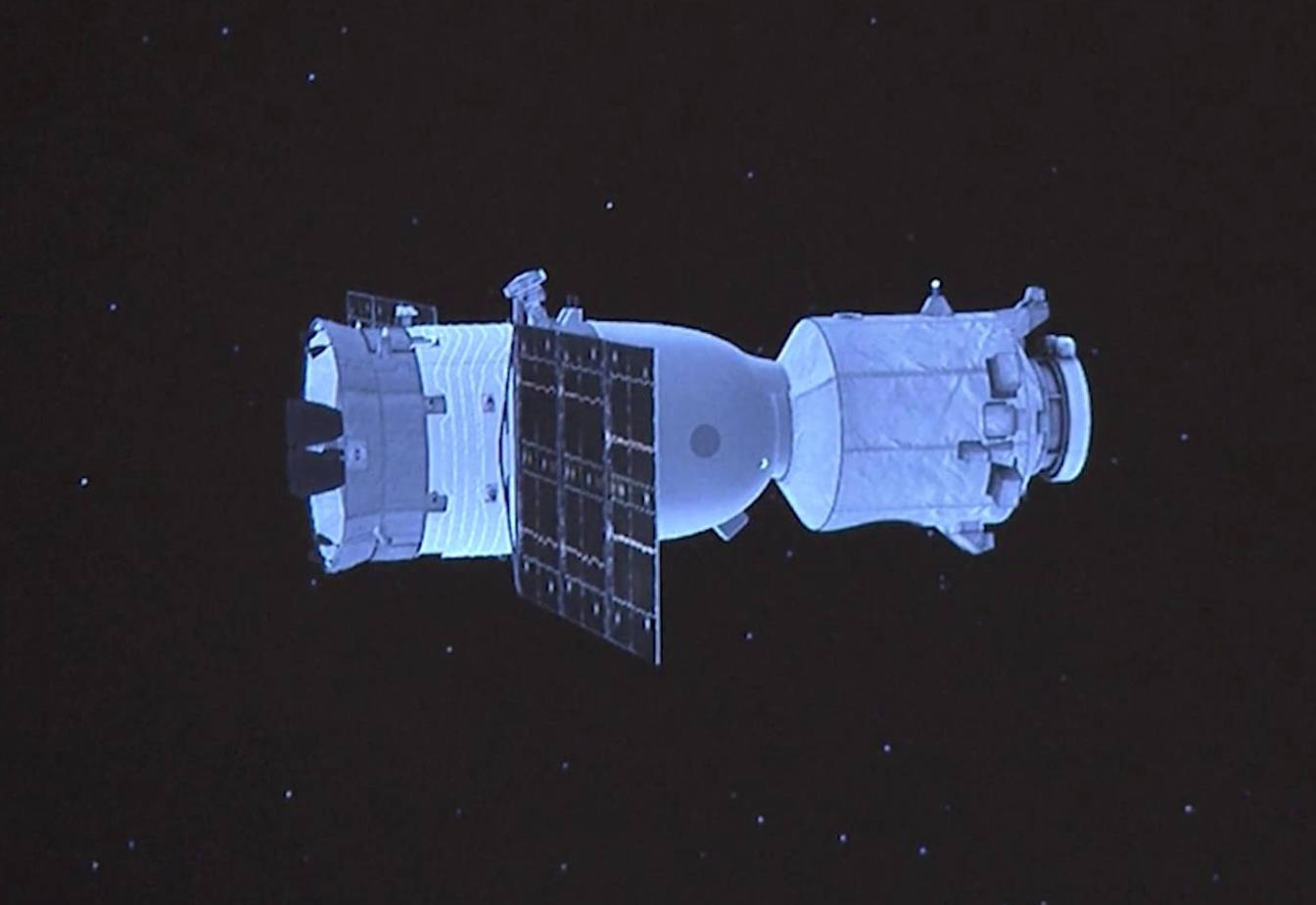
神舟十三号载人飞船与长征2F遥十三“船箭分离”
火箭发射虽然完成了 , 但是飞船入轨段工作才刚刚开始 , 需要确认一系列的状态 。
船箭分离后太阳翼与中继天线相继展开 , 然后确认太阳翼驱动机构 , 航天员还要报告座舱环境 , 在地面确认座舱环境后 , 航天员可打开舱内压力服面窗 。 由于是夜间发射入轨后神舟飞船还处在阴影区 , 等待进入阳照区确认太阳翼发供电能力之后 , 酒泉卫星发射中心正式宣告神舟十三号任务发射圆满成功 。
文章图片
神舟十三号太阳翼、中继天线相继展开
紧接着神舟十三号进入6.5小时全自主快速交会对接模式 。 不论是全自主快速交会对接 , 亦或者其他传统交会对接 , 追踪飞行器与目标飞行器之间通常有三个阶段任务 , 依次分别是远距离导引段、近程控制段(寻的段、接近段、平移靠拢段)、对接段 。
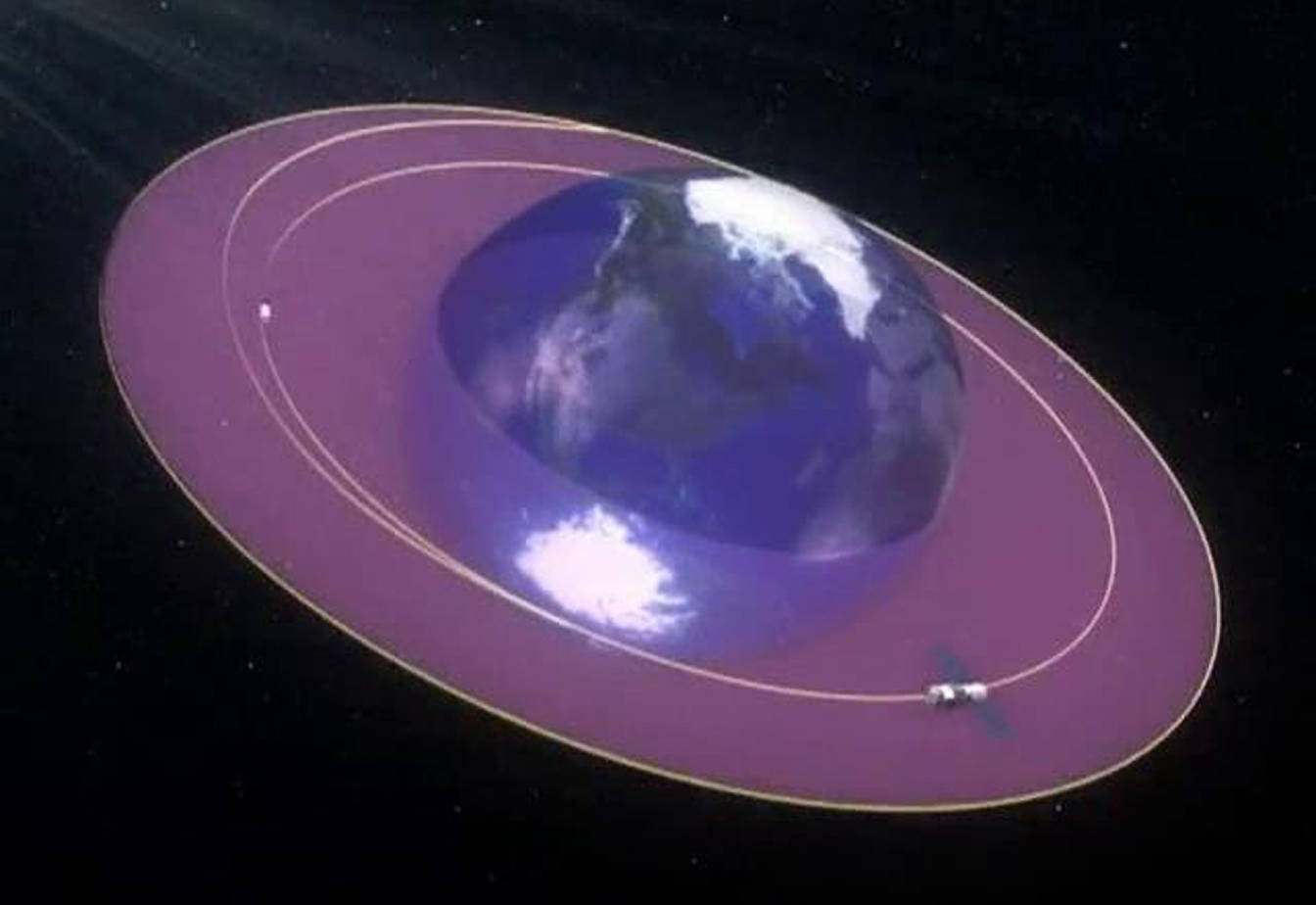
全自主快速交会对接与传统两天交会对接模式最大的不同之处在于“远距离导引段” , 进入空间站任务之前飞船在此阶段需要依靠地面测控站测算轨道位置 , 再根据上行指令进行轨道机动 , 耗时耗力 , 效率低 , 所以需要的时间比较长 。
文章图片
远距离导引段
自天舟二号开始“远距离导引段”引入全自主导航 , 飞船可以在轨解算轨道信息并自主控制进行机动变轨 , 这主要得益于北斗卫星导航系统 , 使得飞船与空间站的空间位置信息获取更加便利 。
神舟十三号入轨后在远距离导引段采用三圈六次变轨方案 , 总计耗时约4.5小时 , 完成六次变轨后飞船就来到了空间站后下方约50公里 , 远距离导引段工作结束 。
在相距200公里时飞船微波雷达与空间站微波雷达应答机建立空空通信链路 , 此举旨在完成远距离捕获、稳定跟踪、精准导引三大任务 。
文章图片
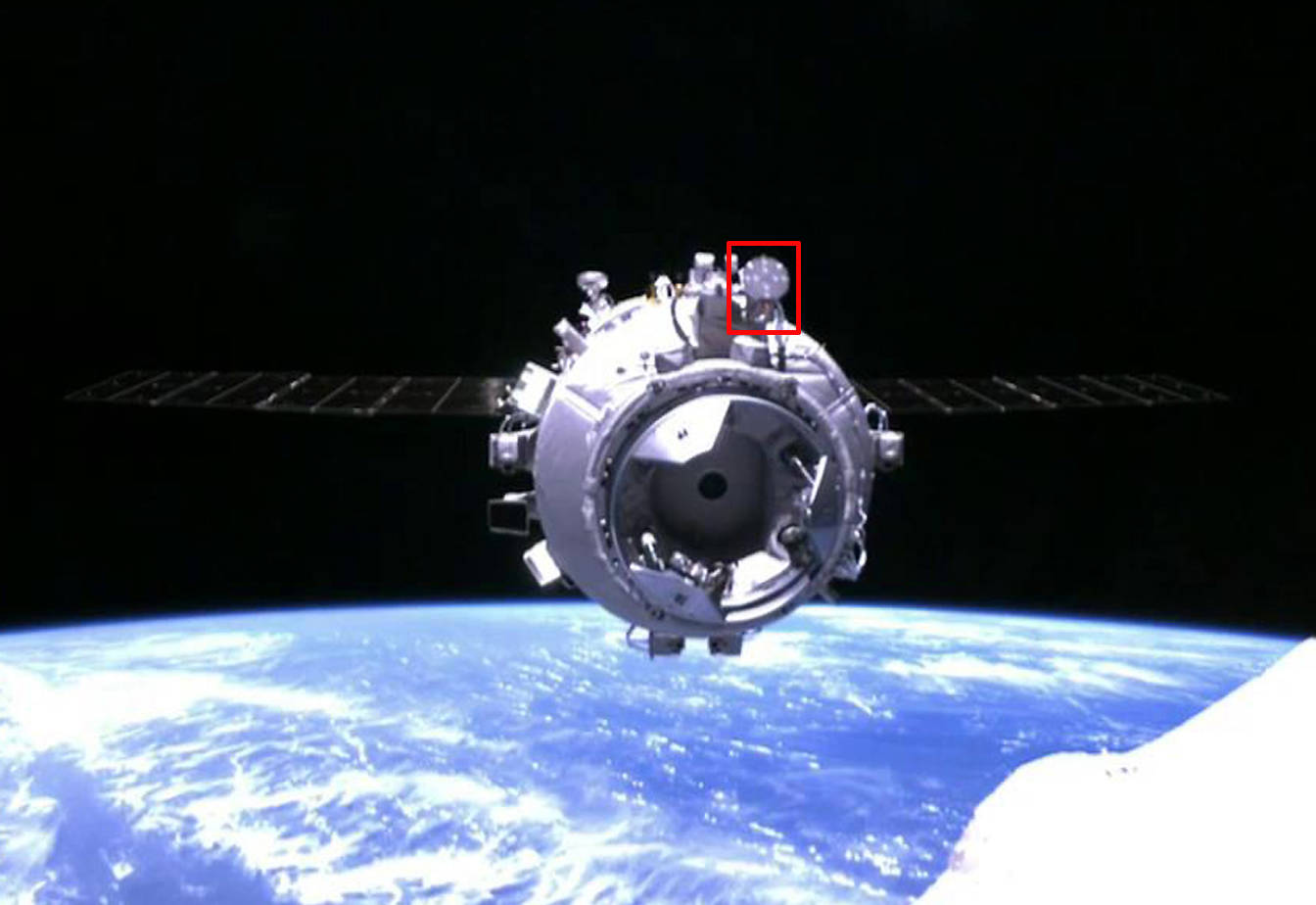
交会对接微波雷达
新一代交会对接微波雷达不仅具备跟踪测量功能 , 还能通信 , 在测距精度、轻量化等指标上达到国际领先水平 。
天和一号核心舱有2个实验舱永久停泊口与3个飞船对接口 , 3个飞船口分别是后向对接口、前向对接口、径向对接口 , 后向对接口主要用于货运飞船对接 , 用于神舟飞船的对接口数量是2个 。
推荐阅读





- 地球|马斯克否认“星链”占用地球空间轨道:能容纳数百亿颗卫星
- SpaceX|马斯克否认“星链”占用地球空间轨道:能容纳数百亿颗卫星
- 人物|马斯克否认星链卫星挤占太空空间:地球低轨道能容纳几百亿颗卫星
- 中国|印尼雅万高铁开始无砟轨道铺设
- 轨道|我国成功发射通信技术试验卫星九号
- 运载火箭|将天绘-4卫星送入预定轨道,长二丁运载火箭今年圆满收官
- 太阳轨道|冬奥会奖牌里 蕴含着古老的天文知识
- 犯罪嫌疑人|数据安全步入法治化轨道
- IT|“上海-武汉”轨道交通乘车二维码实现互联互通
- 天宫|神舟十三号航天员乘组今日将开展第二次出舱活动