文章图片
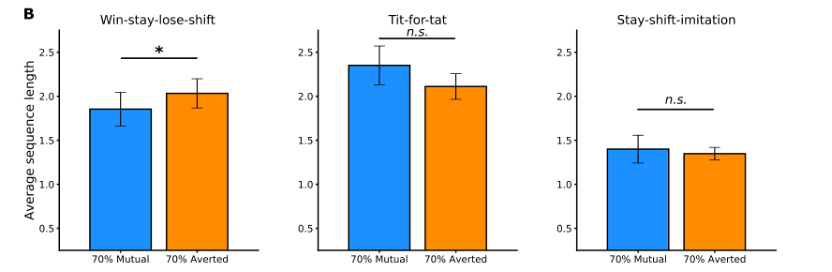
WSLS模式序列的平均长度在70%Averted条件下显著更大 。 T4T和SS-Imit没有发现显着差异 。
整个研究表明 , 对人类而言 , 即使是来自机器人的凝视也可以成为一种强烈的社会信号 , 影响他们的决策行为和神经信号模式 。 “因此 , 在人们需要专注于自己的决策过程的环境中 , 这可能会分散注意力 。 在这样的背景下 , 具有社交行为的机器人可能并不总是对人类有益 , ”Agnieszka Wykowska对澎湃新闻表示 。
对于接下来的研究计划 , Agnieszka Wykowska表示 , 将来会继续研究是否以及何时需要与机器人进行社会协调 。 “我们认为 , 现在重要的是识别那些帮助机器人成为一个社会体的其他(微妙)行为 , 并了解这些行为是否(以及在哪些情况下)对人类有益 。 希望这将有助于机器人专家设计出在特定应用场景中表现最好的机器人 。 ”
附:
文章图片
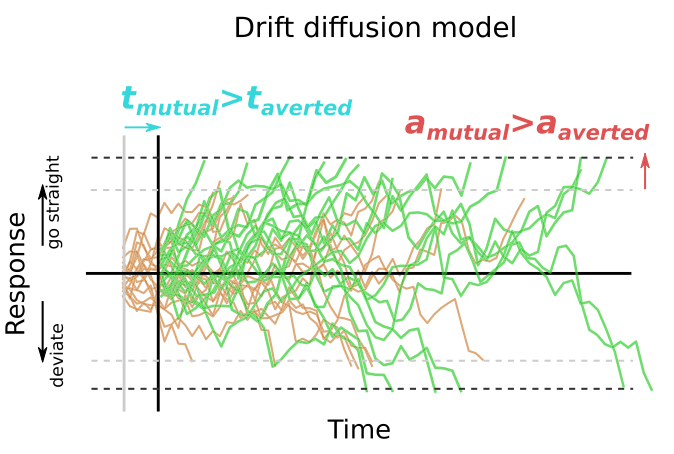
漂移扩散模型将决策描述为一个嘈杂的漂移过程 , 当跨越相应的边界时选择一个动作 。 假设机器人的凝视对模型参数的一个、两个或没有影响 , 测试了五个变体 。 根据贝叶斯参数估计 , 发现最佳拟合模型是将响应时间的差异对非决策时间t和决策阈值a产生影响的模型 。
文章图片
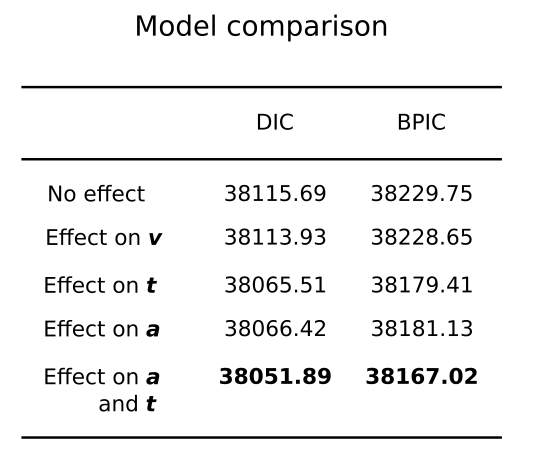
DIC , 偏差信息准则;BPIC , 贝叶斯预测信息准则 。 较低的值更好 。
文章图片
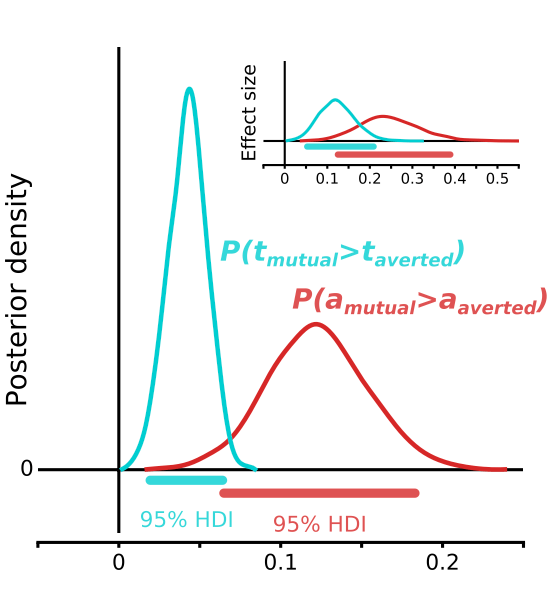
最佳拟合模型的效果分布的后密度 , 显示对a和t参数的显着影响 。 HDI , 最高密度区间 。 误差线代表95%的置信区间 。
文章图片
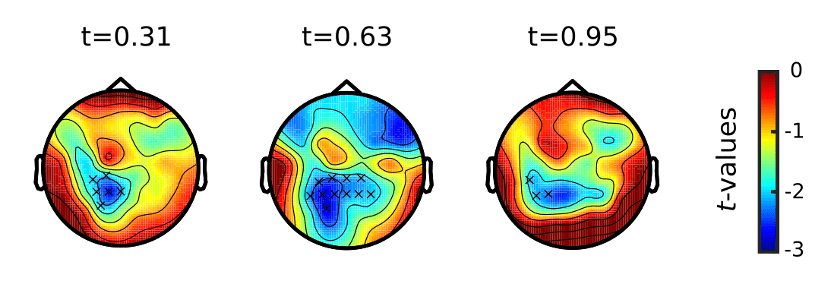
决策期间凝视类型之间的头皮地形 。考虑到来自两个参与者组的数据 , 地形图显示了凝视条件(回避凝视-相互凝视)之间引发的 alpha 振荡(8 至 12 Hz)差异的 t 值图 。统计上显着的集群由x标记 。条件之间的差异是通过基于非参数聚类的排列测试发现的 。 t值定义为两个条件的估计平均值之间的差异与其标准误差的比值 。 相对于所展示的凝视的建立(每320毫秒) , 在t = 0.31 s到t=0.95s的时间范围内描绘了地形 。
文章图片
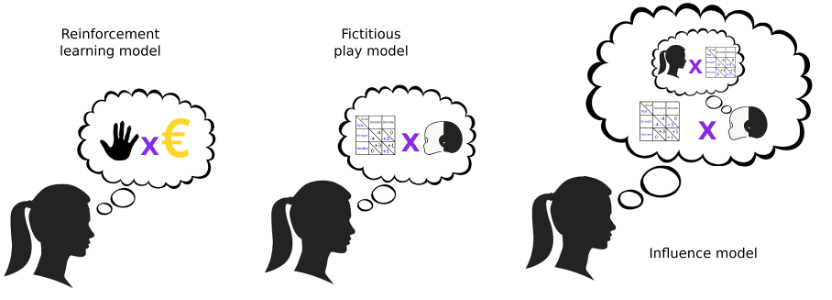
模型示意图:参与者对iCub行为的推理程度的计算模型 。
强化学习模型(RL)根据最近选择的动作及其结果做出决策 。 虚拟游戏模型(Fic)根据游戏的收益矩阵和对手的预测动作做出决策 。 影响模型(Inf)做同样的事情 , 同时假设对手也在预测玩家的选择 , 并将其自身行为的影响纳入对对手决策的预测 。
推荐阅读






- 样儿|从太空看地球新年灯光秀啥样儿?快看!绝美风云卫星图来了
- 画室|互不见面共庆生!华卿画室里的生日会:“蛋糕、祝福啥都不能少!”
- 人物|说到做到 俞敏洪首场带货直播卖啥?
- 市场|折叠屏手机为啥火了?成熟可能还需要两年时间
- 生活|又有银行APP下架了 未来手机银行能干啥?
- OPPO|折叠屏手机为啥火了
- 粉丝|一些青年为啥愿意为“线上练肉”掏钱
- 手机|折叠屏手机为啥火了,值不值得买? 专家:目前主打礼品市场
- 人物|一些青年为啥愿意为“线上练肉”掏钱
- 市场|折叠屏手机为啥火了