文章图片
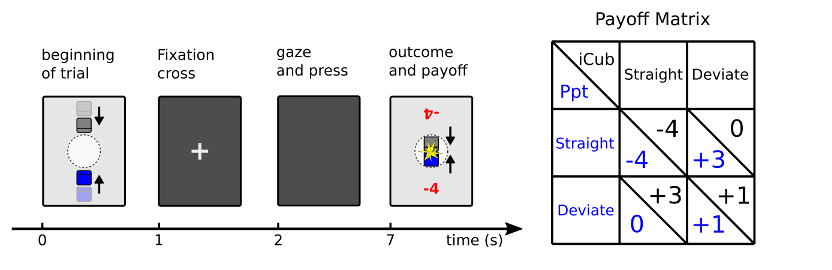
参与者与iCub机器人面对面 , Chicken Game显示在他们之间的屏幕上(Chicken Game为游戏名 , 被称为“胆小鬼博弈” 。 游戏中两名车手相对驱车而行 。 如果两人拒绝转弯 , 任由两车相撞 , 最终两人都会死于车祸;但如果有一方转弯 , 而另一方没有 , 那么转弯的一方会被耻笑为“胆小鬼”chicken , 另一方胜出) 。
文章图片
在参与者决策期间操纵机器人的凝视(标记为“凝视和按下” , 在2到7秒的位置) 。 在查看iCub后 , 参与者必须决定是直行还是偏离 。 试验的结果和每个玩家的收益由两个玩家的选择组合决定 。
文章图片
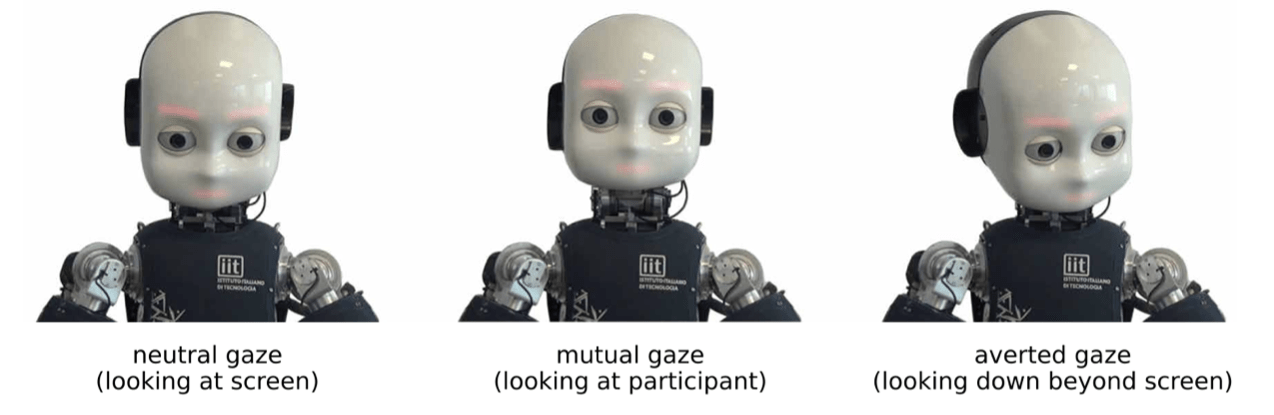
从左到右分别为:人形iCub机器人处于中间状态看向屏幕;iCub与参与者对视 , 看向参与者;iCub避免对视 , 看向屏幕下方
研究人员发现 , 相对于回避凝视 , 当参与者与iCub建立相互凝视时 , 其对iCub的反应较慢 。 同时 , 这还伴随着阿尔法(alpha)脑电波活动(一种与抑制注意力有关的脑电波模式)的增加 。 与没有受到机器人凝视的参与者相比 , 在机器人凝视下的参与者表现出延迟的决定、较慢的响应时间和不同的神经波模式 。
因此 , 作者假设 , 机器人凝视下更高的阿尔法同步(阿尔法同步被解释为对抑制干扰信息的需求增加的标志)可能代表参与者需要在专注于游戏的同时抑制分心 , 从而导致更长的反应时间 。
【iCub|你瞅啥?《科学》子刊:机器人的凝视如何影响人类行为】“具有社交行为的机器人可能并不总是对人类有益”
在面对更高频率回避凝视的机器人 , 参与者更有可能根据当前结果重复他们之前的动作——一种“自我导向”的策略 , 玩家只需要关注自己动作的信息并反映个人决策 。 相比之下 , 受到机器人凝视的参与者采用了“面向他人”的策略 , 该策略要求参与者处理机器人对手的动作和结果 , 即参与者从上次试验中复制对手的行为 。
文章图片
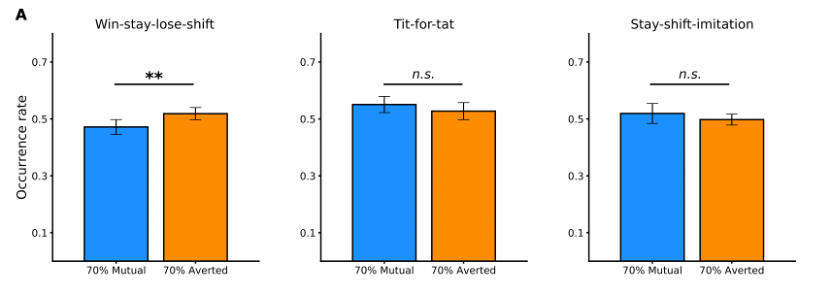
参与者选择序列中自我导向和他人导向的战略行为模式 。
自我导向(Win-stay-lose-shift,简称WSLS , 双赢双输策略 , 如果产生的收益达到其期望水平 , 则重复之前的举措 , 否则就变化策略)和两种其他导向(Tit-for-tat , 简称T4T , 以牙还牙策略 , 对手在上一轮做了什么 。 对手合作就合作 , 对手叛逃就叛逃;Stay-shift-imitation , 简称SS-Imit , 模仿策略)模式的发生率 。
自我导向的WSLS在更多暴露于相互凝视的参与者的选择中出现明显较少 , T4T和SS-Imit没有发现显着差异 。
推荐阅读





- 样儿|从太空看地球新年灯光秀啥样儿?快看!绝美风云卫星图来了
- 画室|互不见面共庆生!华卿画室里的生日会:“蛋糕、祝福啥都不能少!”
- 人物|说到做到 俞敏洪首场带货直播卖啥?
- 市场|折叠屏手机为啥火了?成熟可能还需要两年时间
- 生活|又有银行APP下架了 未来手机银行能干啥?
- OPPO|折叠屏手机为啥火了
- 粉丝|一些青年为啥愿意为“线上练肉”掏钱
- 手机|折叠屏手机为啥火了,值不值得买? 专家:目前主打礼品市场
- 人物|一些青年为啥愿意为“线上练肉”掏钱
- 市场|折叠屏手机为啥火了