本文图片
1998年奋进号航天飞机执行任务期间拍摄到的疑似空间碎片 。 版权/NASA
主要航天国家和国际组织都会对所属重点航天器执行碰撞预警和机动规避 。 截至2020年 , 国际空间站已执行规避危险碎片操作28次 , 其中仅2020年就有3次 。 欧洲空间局(ESA)平均每颗低轨卫星每年需执行两次避碰操作 。 我国神舟五号飞船开始 , 发射预警和在轨预警已经成为常态化的事情 。 随着空间碎片环境的不断恶化 , 航天器碰撞预警需求将急剧增加 。
/ 清除空间碎片
随着航天活动的蓬勃发展 , 如不加以治理 , 空间碎片环境将快速恶化 。 在轨空间碎片大量累积将导致航天器运行风险随之增加 , 甚至造成轨道空间无法利用 。
为维护外空活动的长期可持续发展 , 需要采取主动措施从地球轨道上移除一些对空间碎片环境长期演化有较大影响的空间碎片 。 目前 , 空间碎片主动清除的方式主要可以分为两类:一类是接触式的 , 如机械臂抓 , 网捕等;另一类是非接触式的 , 如激光推移、离子束推移等 。 不管何种方法 , 其目的都是让碎片离开当前轨道 , 避免再次与其他在轨碎片发生碰撞 。 国际上目前已经开展了一些概念研究和初步的演示验证实验 。
1993年 , NASA提出利用地基脉冲激光器清除近地轨道垃圾的“猎户座”(ORION)计划 。 该计划拟采用地基激光清除空间碎片 , 以减缓空间碎片对载人航天的威胁 。 后期该计划将重点转移至在轨的激光清除 。
2013年 , 英国萨里太空中心联合欧洲多家研究机构 , 在欧盟第七框架计划(FP7)资助下 , 启动“空间碎片移除”计划 。 2018年6月 , 试验卫星“RemoveDEBRIS”脱离空间站开始入轨运行 。 该计划演示了空间目标的网捕、鱼叉清除过程 , 以及碎片在轨跟踪技术 。
2018年9月 , 试验卫星成功网捕用于模拟空间碎片的立方体卫星;同年10月 , 试验卫星星载探测设备对立方体卫星的旋转和移动进行跟踪 。 2019年2月 , 试验卫星的“鱼叉”成功撞击并击穿目标面板 , 验证了其抓捕空间碎片的能力 。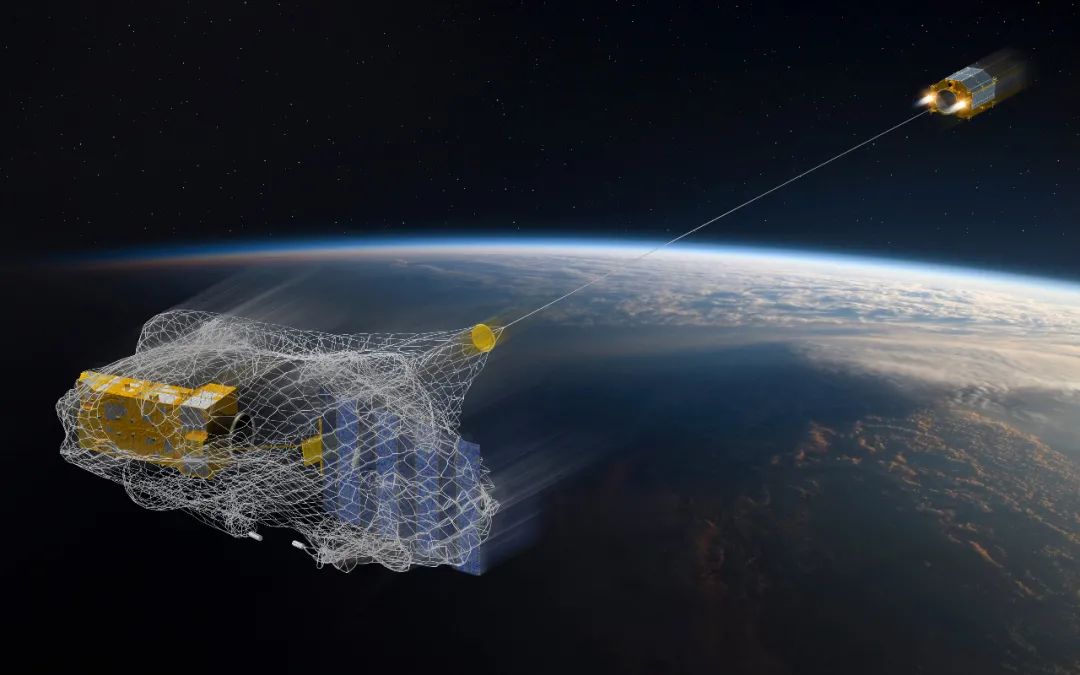
本文图片
2018年9月 , 空间碎片移除计划(Remove DEBRIS)的试验卫星 , 成功网捕用于模拟空间碎片的立方体卫星 。 版权/NASA
2019年12月 , ESA委托瑞士初创公司“清洁太空”(Clear Space)计划已于2020年3月启动 , 并将于2025年发射航天器清理ESA位于轨道上一块碎片——织女星火箭二次有效载荷适配器(Vespa) 。
近年来 , 我国在空间碎片主动清除方面也取得了长足发展 。 2016年6月 , 我国发射自主研制的“遨龙一号”空间碎片主动清除飞行器 , 开展了空间碎片探测、识别、跟踪与操作等在轨演示验证试验 , 为后续开展空间碎片主动清除创造了基本条件 。
推荐阅读







- 样儿|从太空看地球新年灯光秀啥样儿?快看!绝美风云卫星图来了
- 最新消息|世界单体容量最大漂浮式光伏电站在德州并网发电
- 四平|智慧城市“奥斯卡”揭晓!祝贺柯桥客户荣获2021世界智慧城市治理大奖
- 系列|2021中国航天发射圆满收官!年发射55次居世界第一
- 科技创新平台|云南:打造世界一流食用菌科技创新平台
- 堆芯|全球首座,世界领跑!
- 视觉|超高色准打破行业天花板,创维S82还原真实世界
- 地球|马斯克否认“星链”占用地球空间轨道:能容纳数百亿颗卫星
- SpaceX|马斯克否认“星链”占用地球空间轨道:能容纳数百亿颗卫星
- 机器人|捷报!万州高级中学勇夺机器人比赛世界冠军