【深度|SLAM的前世今生 | 解惑一直来的疑问 凌鸟智能】随着AGV市场的不断增大 , 需求增大 , 应用场景也越来越复杂 , AGV的创新也是随之而来 , 在导航上 , 从最开始的磁导航到二维码导航 , 激光导航 , 视觉导航 , 路径越来越柔性 , 布局越来越美观 , 维护越来越方便 。

文章图片
当下最流行的就是SLAM技术 , 从最早的军事用途(核潜艇海底定位就有了SLAM的雏形)到今天 , 已经逐步走入人们的视野 , 过去几年扫地机器人的盛行让它名声大噪 , 近期基于三维视觉的VSLAM又让它越来越显主流 , 但是大家对SLAM的理解也是层出不穷 。
文章图片
1964年美国投入使用GPS , 突然就打破了大家的游戏规则 。 军用的P码可以达到1-2米级精度 , 开放给大众使用的CA码也能够实现5-10米级的精度 。
后来大家一方面为了突破P码封锁 , 另一方面为了追求更高的定位定姿精度 , 想出了很多十分具有创意的想法来挺升GPS的精度 。 利用RTK的实时相位差分技术 , 甚至能实现厘米的定位精度 , 基本上解决了室外的定位和定姿问题 。
但是室内这个问题就难办多了 , 为了实现室内的定位定姿 , 一大批技术不断涌现 , 其中 , SLAM技术逐渐脱颖而出 。 首先要从它的传感器讲起~
目前用在SLAM上的Sensor主要分两大类 , 激光雷达和摄像头 。

文章图片
这里面列举了一些常见的雷达和各种深度摄像头 。 激光雷达有单线多线之分 , 角分辨率及精度也各有千秋 。 SICK、velodyne、Hokuyo以及国内的北醒光学、Slamtech是比较有名的激光雷达厂商 。 他们可以作为SLAM的一种输入形式 。
这个小视频里展示的就是一种简单的2D SLAM 。
文章图片
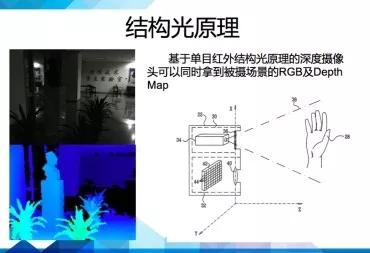
而VSLAM则主要用摄像头来实现 , 摄像头品种繁多 , 主要分为单目、双目、单目结构光、双目结构光、ToF几大类 。 他们的核心都是获取RGB和depth map(深度信息) 。
▌最近流行的结构光和TOF
结构光原理的深度摄像机通常具有激光投射器、光学衍射元件(DOE)、红外摄像头三大核心器件 。
文章图片
这个图(下图)摘自primesense的专利 。
可以看到primesense的doe是由两部分组成的 , 一个是扩散片 , 一个是衍射片 。 先通过扩散成一个区域的随机散斑 , 然后复制成九份 , 投射到了被摄物体上 。 根据红外摄像头捕捉到的红外散斑 , PS1080这个芯片就可以快速解算出各个点的深度信息 。
这儿还有两款结构光原理的摄像头 。
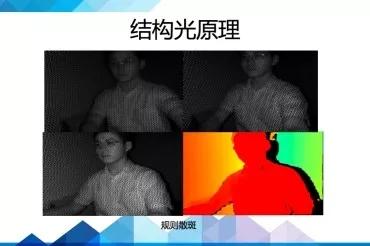
文章图片

文章图片
第一页它是由两幅十分规律的散斑组成 , 最后同时被红外相机获得 , 精度相对较高 。 但据说DOE成本也比较高 。
还有一种比较独特的方案(最后一幅图) , 它采用mems微镜的方式 , 类似DLP投影仪 , 将激光器进行调频 , 通过微镜反射出去 , 并快速改变微镜姿态 , 进行行列扫描 , 实现结构光的投射 。 (产自ST , ST经常做出一些比较炫的黑科技) 。
ToF(time of flight)也是一种很有前景的深度获取方法 。
传感器发出经调制的近红外光 , 遇物体后反射 , 传感器通过计算光线发射和反射时间差或相位差 , 来换算被拍摄景物的距离 , 以产生深度信息 。 类似于雷达 , 或者想象一下蝙蝠 , softkinetic的DS325采用的就是ToF方案(TI设计的) , 但是它的接收器微观结构比较特殊 , 有2个或者更多快门 , 测ps级别的时间差 , 但它的单位像素尺寸通常在100um的尺寸 , 所以目前分辨率不高 。
有了深度图之后呢 , SLAM算法就开始工作了 , 由于Sensor和需求的不同 , SLAM的呈现形式略有差异 。 大致可以分为激光SLAM(也分2D和3D)和视觉SLAM(也分Sparse、semiDense、Dense)两类 , 但其主要思路大同小异 。

文章图片
▌SLAM算法实现的4要素
SLAM算法在实现的时候主要要考虑以下4个方面吧:
1. 地图表示问题 , 比如dense和sparse都是它的不同表达方式 , 这个需要根据实际场景需求去抉择
2. 信息感知问题 , 需要考虑如何全面的感知这个环境 , RGBD摄像头FOV通常比较小 , 但激光雷达比较大
3. 数据关联问题 , 不同的sensor的数据类型、时间戳、坐标系表达方式各有不同 , 需要统一处理
4. 定位与构图问题 , 就是指怎么实现位姿估计和建模 , 这里面涉及到很多数学问题 , 物理模型建立 , 状态估计和优化其他的还有回环检测问题 , 探索问题(exploration) , 以及绑架问题(kidnapping) 。

文章图片
这个是一个比较有名的SLAM算法 , 这个回环检测就很漂亮 。 但这个调用了cuda , gpu对运算能力要求挺高 , 效果看起来比较炫 。
▌SLAM的今生——最大的困难
多传感器融合、优化数据关联与回环检测、与前端异构处理器集成、提升鲁棒性和重定位精度都是SLAM技术接下来的发展方向 , 但这些都会随着消费刺激和产业链的发展逐步解决 。 就像手机中的陀螺仪一样 , 在不久的将来 , 也会飞入寻常百姓家 , 改变人类的生活 。
SLAM在全面进入消费级市场的过程中 , 也面对着一些阻力和难题 。 比如Sensor精度不高、计算量大、Sensor应用场景不具有普适性等等问题 。
激光雷达优点是可视范围广 , 但是缺点性价比低 , 低成本的雷达角分辨率不够高 , 影响到建模精度 。 vSLAM的话缺点就是FOV通常不大 , 50-60degree , 这样高速旋转时就容易丢 。 不过 , 市场还是有解决方案的 。

文章图片
推荐阅读







- 星链|石豪:在太空,马斯克和美国当局是如何作恶的
- 快报|“他,是能成就导师的学生”
- 区块|面向2030:影响数据存储产业的十大应用(下):新兴应用
- 年轻人|人生缺少的不是运气,而是少了这些高质量订阅号
- 生活|气笑了,这APP的年度报告是在嘲讽我吧
- bug|这款小工具让你的Win10用上“Win11亚克力半透明菜单”
- 苏宁|小门店里的暖心事,三位创业者的雪域坚守
- 历史|科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 空间|(科技)科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 生活|数字文旅的精彩生活