作者: 俄亥俄州立大学五年级博士生 熊华清
NeurIPS 2020 文章专题
第·4·期
本文将分享 俄亥俄州立大学发表于 NeurIPS 2020的工作: 《Double Q-learning的有限时长分析》 。
这项工作从理论角度探索了在深度强化学习中有着广泛应用的double Q-learning算法 , 并首次给出了在有限状态-行为空间(finite state-action space)下该算法的有限时长分析(收敛的时间复杂度) 。
通过进一步比较double Q-learning与已有工作中Q-learning的收敛速率 , 本文还得出了double Q-learning更适合用于高精度任务的结论 。 通过刻画double Q-learning算法收敛的时间复杂度 , 本文旨在帮助加深对该算法的理解 , 并为进一步理解深度强化学习做铺垫 。
文章图片
https://arxiv.org/pdf/2009.14257.pdf
一、研究背景
虽然在引言中我们已介绍本文首次给出了double Q-learning (以下用DQL代替) 的收敛速率分析 , 但这并不意味着该算法是强化学习芸芸算法中的“新贵”或是“无名小卒” 。 事实上 , DQL是一个已有十年历史 , 并在深度强化学习中有着极广泛应用的算法 。
首先来简单看一下DQL为什么会被提出 。 从算法的名字 , 我们很自然会联想到强化学习中最基础最重要的算法之一——Q-learning算法 。 的确 , DQL的提出正与之息息相关 。 虽然Q-learning已被理论证明可以找到最优策略 (policy), 但在实际应用中 , 由于采样过程以及回报函数估计中存在的随机性和误差 , Q-learning中的最大值函数往往会造成过估计 (overestimation) 问题 (这一点将在算法回顾部分重点分析), 进而可能导致只能学习到次优策略 , 而DQL就是通过引入双估计器 (double Q estimators) 的办法 (Q-learning采用单估计器) 来有效控制这种过估计问题 。
DQL虽然设计思路清晰 , 应用简洁方便 , 但却也并非一炮而红 。 与历史上许多其他模型或算法 (如神经网络) 一样 , DQL虽然好用 , 但也需要一个舞台 , 一个契机让它进入人们视野 , 发挥自身价值 。 在这个契机来临之前 , DQL也只能在浩瀚的论文库中默默等待 。
2015年底2016年初 , 由谷歌Deepmind研发的围棋机器人AlphaGo横空出世 , 击败了李世石九段后 , 随着AlphaGo一起成为热门话题的 , 是深度强化学习技术 。 而AlphaGo中的核心算法—— 深度Q网络 (DQN), 也于2016年初登上了Nature期刊 , 自此也成为了学界炙手可热的研究课题 。 除了DQN在Atari游戏和AlphaGo中的大放异彩 , 还有一个重要契机 , 便是DQL的原作者Hasselt , 此时正在Deepmind工作 。
于是很自然地 , Hasselt和David Silver等人也将DQL应用到了DQN中 , 并重新刷新了几乎所有Atari游戏的最好成绩 , 也是从这篇论文开始 , DQL几乎就成了和DQN如影随形的存在 , 在实际应用中非常广泛 , 效果也非常好 。
那么问题来了 , 既然DQL历史也不算短 , 知名度也不低 , 为什么之前一直没有收敛速率的理论工作出现呢?除了研究强化学习理论的课题组不多的无奈事实外 , 还有一个重要因素 , 那就是与Q-learning相比 , DQL的理论分析中有其独特的难点存在 。 为了理解这些难点 , 我们首先需要理解算法设计及其思想 , 特别是理解DQL与Q-learning的差异 。
二、算法回顾
接下来我们首先回顾一下Q-learning的算法及其问题 , 进而理解DQL的设计理念 。
Q-learning和DQL都是为了学习得到最优Q函数——Q* , 众所周知 , Q*是Bellman方程的唯一不动点 (fixed point) :

文章图片
在上面公式中 , s , a , R分别代表状态 (state), 行为 (action), 回报函数 (reward), s’则表示任务中从 (s,a) 出发得到的下一状态 。 自然地 , 我们就可以用解方程不动点的方法得到Q-learning的基本迭代规则:

文章图片
在这里 , 由于期望在实际中不可得知 (因为s’的分布未知), 因此我们通过采样s’来估计回报函数以及每一步中的最优行为a’ 。
在理解Q-learning是一个解方程不动点的算法后 , 我们来看一下这个算法有什么问题 。 首先 , 它的算法设计是清晰简洁的 , 理论上也被证明了可以收敛到Q* 。 但在实际应用中 , 算法中的最大值函数会带来问题 , 这就是过估计 (overestimation)。
要理解过估计 , 首先要意识到Q-learning的最大值函数 , 事实上是在估计一个求完最大值后的平均值 , 而Bellman方程中的最大值函数 , 则是取期望值中的最大值 。
举例来说 , 如果将一些独立同分布的随机变量表示为
文章图片
, 我们希望得到

文章图片
, 而Q-learning中估计的则是

文章图片
。 显然 ,

文章图片
。 因此 , 在实际应用中 , Q-learning往往会引入正向偏差 , 也就是过估计 。 这种过估计 , 在回报函数估计存在随机误差 , 或在算法执行过程中存在其他估计误差时 , 便尤为明显 。
上面我们已经分析 , Q-learning的过估计问题主要是因为在每一步都采用了最大估计值 , 那么 , 由此想到的一个很自然的解决方案 , 就是避免在每一步都用这么激进的迭代 , DQL正是基于此诞生的 。 下面是DQL的核心迭代步骤:
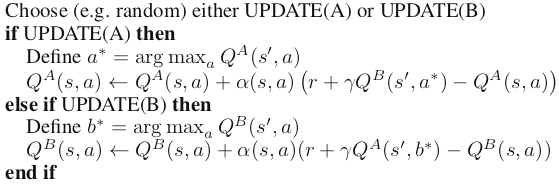
文章图片
可以看出 , DQL每一步还是用了贪心策略 , 但它引入了两个Q估计器(Q estimators) , 从一个Q估计器中取出最优行为后 , 却用了另一个Q估计器来得到该行为的Q估计值 。 比如说 , 如果当前A估计器被选中更新 , 并用A估计器得到了最优行为a* , 虽然a*在A估计器中对应最大估计值 , 但它在B估计器中很可能并非对应最大估计值 。
还有一点 , 那就是每一步A估计器和B估计器被随机选中的概率是一样 , 所以可以认为这两个估计器是对称迭代的 。 综合以上两点 , 可以预计DQL在迭代过程中避免了每一次都用最大估计值 , 也因此可以改善过估计问题 。
三、结果及分析
本文首次对DQL算法进行了 有限时长分析(或非渐进分析)。目前针对DQL仅有的渐进收敛 (asymptotic convergence) 分析并不能刻画出算法的收敛速率 , 因而能提供的理解也很有限 。 有限时长分析关注的恰恰就是 收敛速率问题 , 只有刻画出了收敛速率 , 我们才能对算法的设计有更多的理解 , 才能对不同算法进行比较 。 这种收敛速率的刻画 , 可以想见也比渐进分析难度更大 。
接下来 , 我们主要介绍一下基于理论结果的引申讨论 。 由于DQL是改进Q-learning算法而来的 , 将两者的理论结果进行比较 , 也自然是理解DQL的重要途径 。
通过比较DQL和Q-learning在相同条件下收敛到最优解邻域的时间复杂度 , 我们发现在高精度任务下 , DQL与Q-learning收敛速度相当 , 而在低精度任务下 , DQL收敛速率则要慢于Q-learning 。 因此 , 本文也指出DQL更适合应用于高精度的任务 。
这个结果并不意外 , 从算法设计中 , 可以看出Q-learning每一步都用最大值函数实现了贪心策略 , 这是一种更激进的迭代方法 。 与之相对的 , DQL每一步则有意避开了这种激进的迭代 , 转而用一种相对“消极”的贪心策略 , 在贪心策略本质没有改变的情况下 , 收敛速度放慢也在意料之中 。
四、未来工作展望
有关Q-learning , 前后有近三十年不间断的理论研究 , 相较于此 , 有关DQL的理论理解仍处于起步阶段 , 因此也有着更多的潜在问题 , 比如DQL在状态-行为空间很大甚至无穷时的收敛性问题 。
在状态-行为空间极大时 , Q估计器不再能由表格函数表示 , 此时往往需要用一些参数函数 (如神经网络) 来估计Q函数并迭代 。 可以看出这种设定更接近如今在DQN中广泛使用的DQL , 因此该设定下的收敛性分析也自然非常重要 。 然而 , 这种设定下的分析难度也将进一步变大 , 有待未来更多的探究 。
//
作者介绍:
【收敛|NeurIPS 2020 | Double Q-learning的有限时长分析】熊华清 , 俄亥俄州立大学五年级博士生 (联合导师:俄亥俄州立大学梁颖斌教授 , 南方科技大学张巍教授), 此前于2016年7月从浙江大学控制科学与工程学院获得学士学位 。 他目前的研究方向包括强化学习算法 , 加速算法的收敛性分析 , 以及非凸优化理论等 。
推荐阅读










- 平板|小新 Pad Pro 2020 平板开启 OTA7 ZUI 13 灰度推送
- 国际|特奖得主任队长,清华夺冠NeurIPS 2021国际深度元学习挑战赛
- 国际|2020年我国产出卓越科技论文46万余篇
- 排名|2020年我国国际顶尖期刊论文数量排名世界第二 上升2位
- 最新消息|印度创企2021年获360亿美元投资 比2020年增长2倍
- 未来|汾酒荣获2020年度中国食品工业协会科学技术奖两项殊荣
- the|美国疾控中心公布2020年十大死因:心脏病排名第一 癌症第二
- the|CDC:美国人均预期寿命在2020年缩短近2年
- 疫情|中科院报告:2020年中国共出版科普图书近亿册
- 期刊|中国首部科学传播报告:2020年出版科普图书9853.6万册