机械臂 长10米仅次于美国:中国空间站机械臂能爬行,创新设计让网友惊叹
文章插图
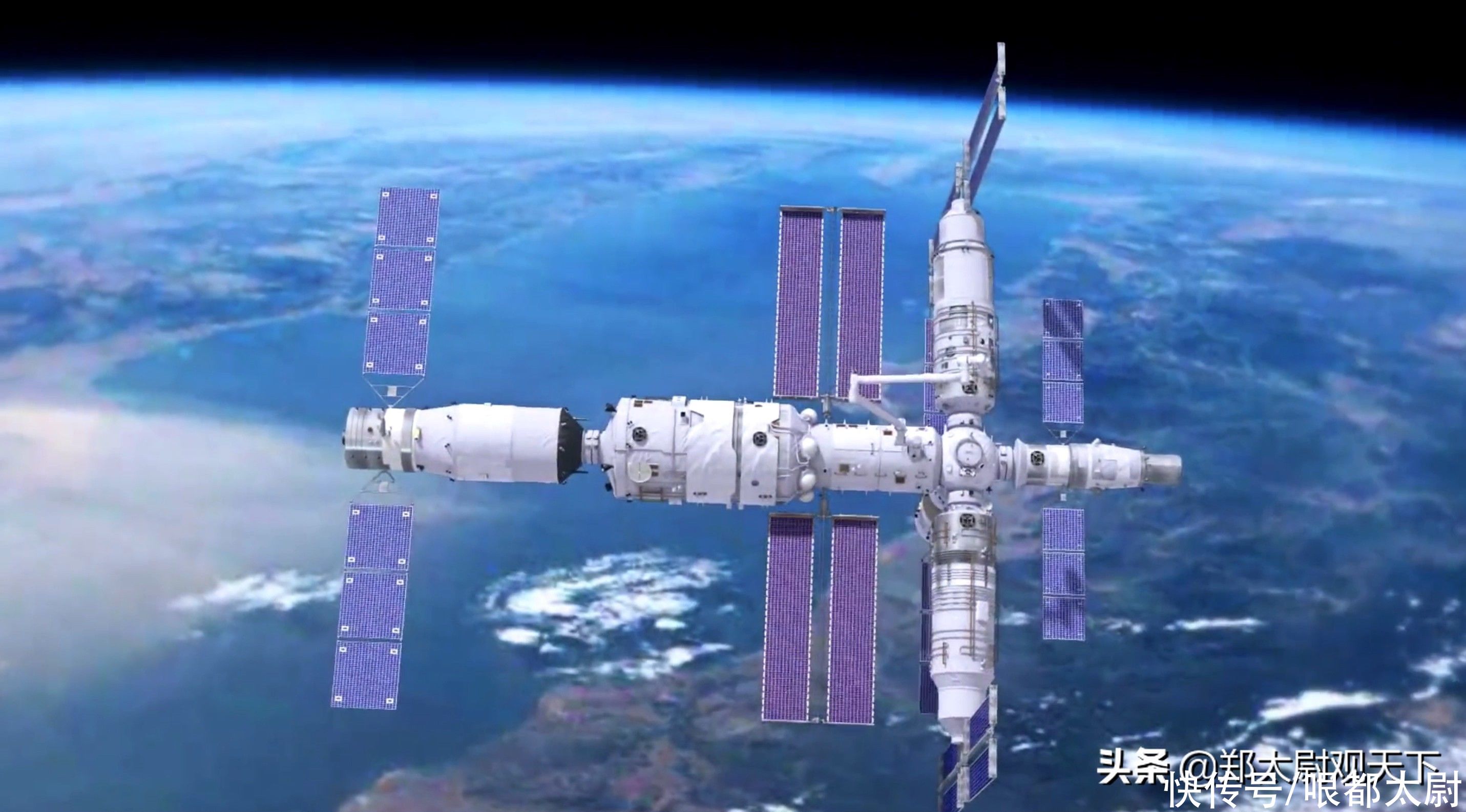
5月18日中国载人航天工程办公室透露,空间站天和核心舱近日先后完成交会对接、航天员驻留、机械臂等平台功能测试,以及空间应用项目设备在轨性能检查,各项功能正常、运行状态良好,已进入交会对接轨道,后续将继续开展与天舟二号货运飞船交会对接的准备工作。特别是随后中国空间技术研究院还特别公布了视频,展示了中国空间站的机械臂一些神奇功能,让网友纷纷点赞!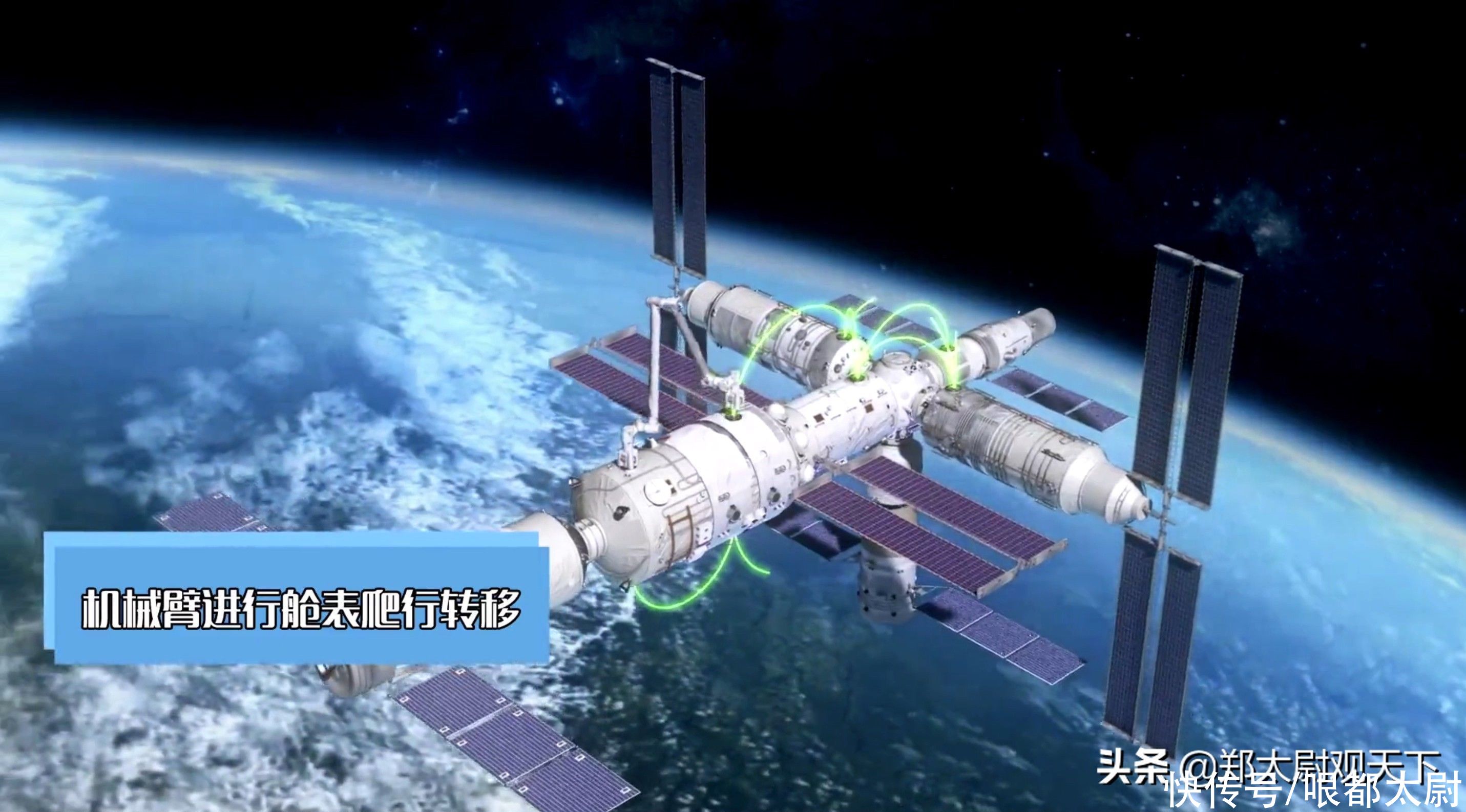
文章插图
在这集名为太空炫舞中国臂的视频中,展示了中国空间站机械臂具备的舱外状态监视、转移实验舱建造空间站、转移货运飞船载荷、辅助航天员出舱活动、辅助航天员舱外修理、空间站外表破损检查、与实验舱机械臂组合、空间站表面爬行转移、监视外部航天器等多种功能,堪称是我们中国在外太空的多面手。特别是机械臂组合、舱外爬行等功能,让网友感到十分惊艳,感觉就是一种太空变形金刚。
文章插图
实际我们国家为了空间站工程的建造,从2007年开始就全面启动了空间站机械臂的研发工作,而当时国际空间站的“加拿大臂2”型空间站机械臂,已经服役了6年。而更早的美国航天飞机使用的加拿大臂-1型机械臂的研制,更要追溯到上世纪80年代,因此从起点来说,我国和西方有着巨大的差距,而背后是中国和发达国家在在机、电、控、动力学、仿真等各个空间机器人专业方向的巨大差距。
在经过10多年的积淀和发展后,可以说我国的空间站机械臂工作,已经逐渐达到了国际领先水平,仅次于美国在国际空间站使用的“加拿大臂2”型机械臂,而领先于欧洲在俄罗斯舱安装的欧洲机械臂和日本在日本舱段安装的日本机械臂。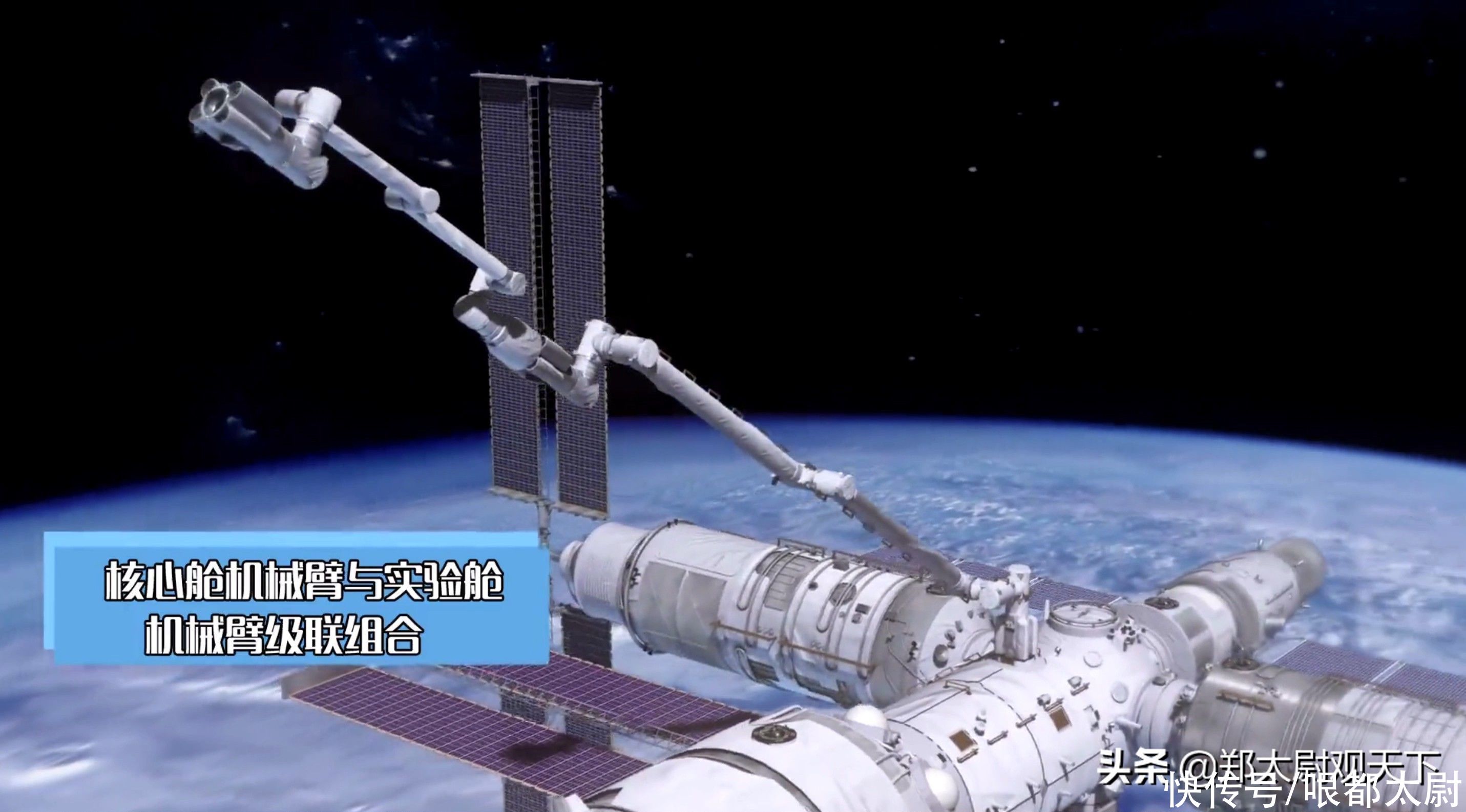
文章插图
例如我国的机械臂长度为10.2米,与问天实验舱机械臂组合后长度能达到15米,仅次于美国的17.6米,远大于欧洲的11.3米和日本的9.9米,而在承载能力上,中国机械臂能承载25吨重量,小于美国的116吨,但远大于欧洲的8吨和日本的7吨。这证明我国已经在高精度伺服控制技术、核心机构部件设计技术、柔性动力学建模与分析技术、目标识别与测量技术等方面都实现了巨大的突破。严格意义上说,美国现在弃用加拿大臂如果自己来研制,也未必能有多高的水平。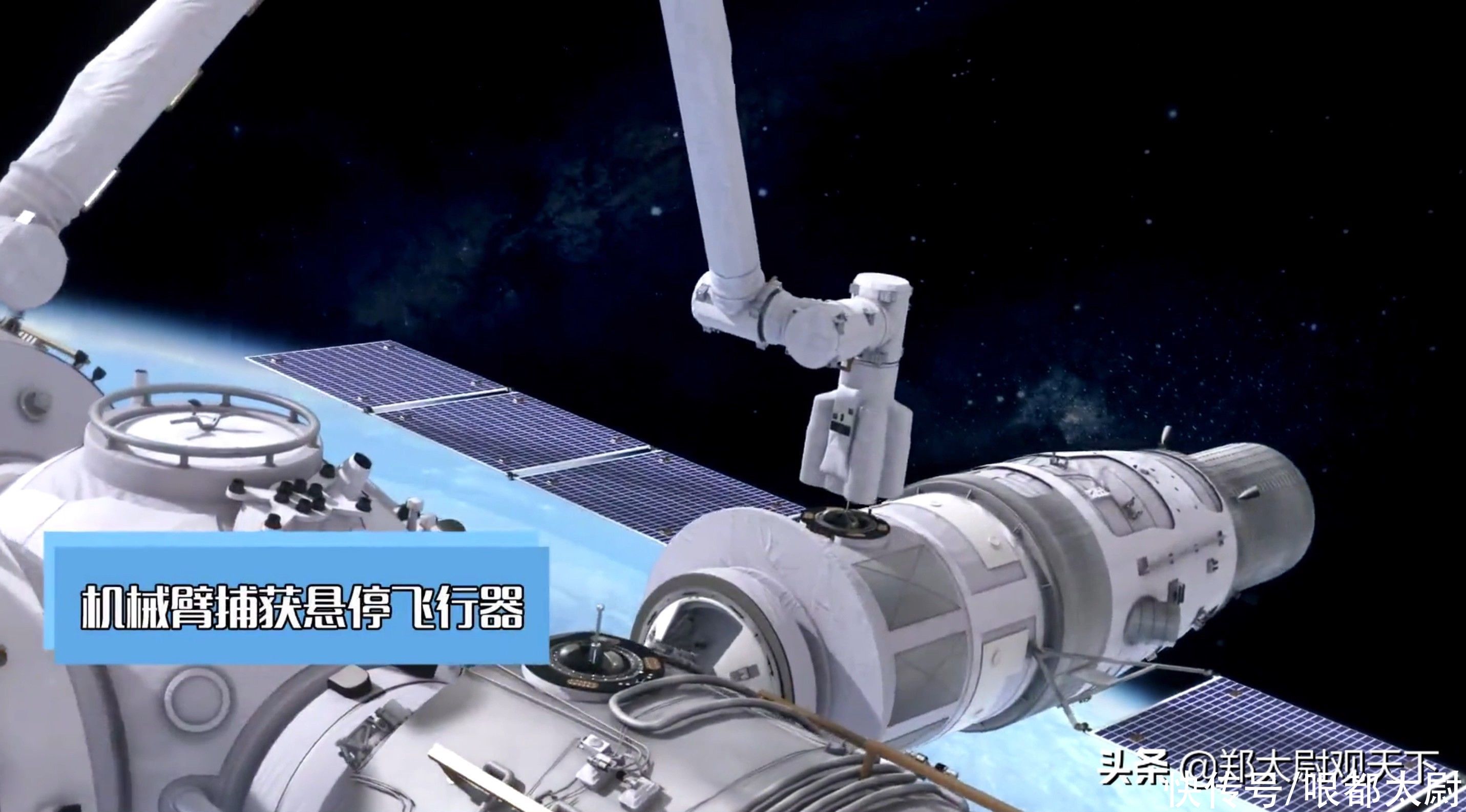
文章插图
【 机械臂|长10米仅次于美国:中国空间站机械臂能爬行,创新设计让网友惊叹】而网友大呼过瘾的机械臂组合技术,由于核心舱机械臂与实验舱机械臂的直径不同,就需要设计转接连接件,而且核心舱机械臂设计有实验舱机械臂所需的测控接口及信息接口,在两臂组合时就能实现电气连接。要实现空间自动电器连接,首先应保证被连接物之间的高精度对接。机械臂的视觉相机必须实现视场范围内已知尺寸、形状、分布和数量等信息的视觉标记快速、可靠的检测和连续跟踪,并实时连续输出相对位置信息。
文章插图
而更神奇的舱外爬行技术,实际美国使用的加拿大臂2型机械臂已经具备舱外爬行的功能,但存在两个问题。首先国际空间站是多国联合制造,舱段各不相同,俄罗斯和日本还都使用了欧洲机械臂和日本机械臂,根本也没有预留让美国机械臂爬行的接口,因此美国的机械臂只能在美国制造的舱段上活动,实际并不能达到爬行的目的,而且也很少进行爬行工作。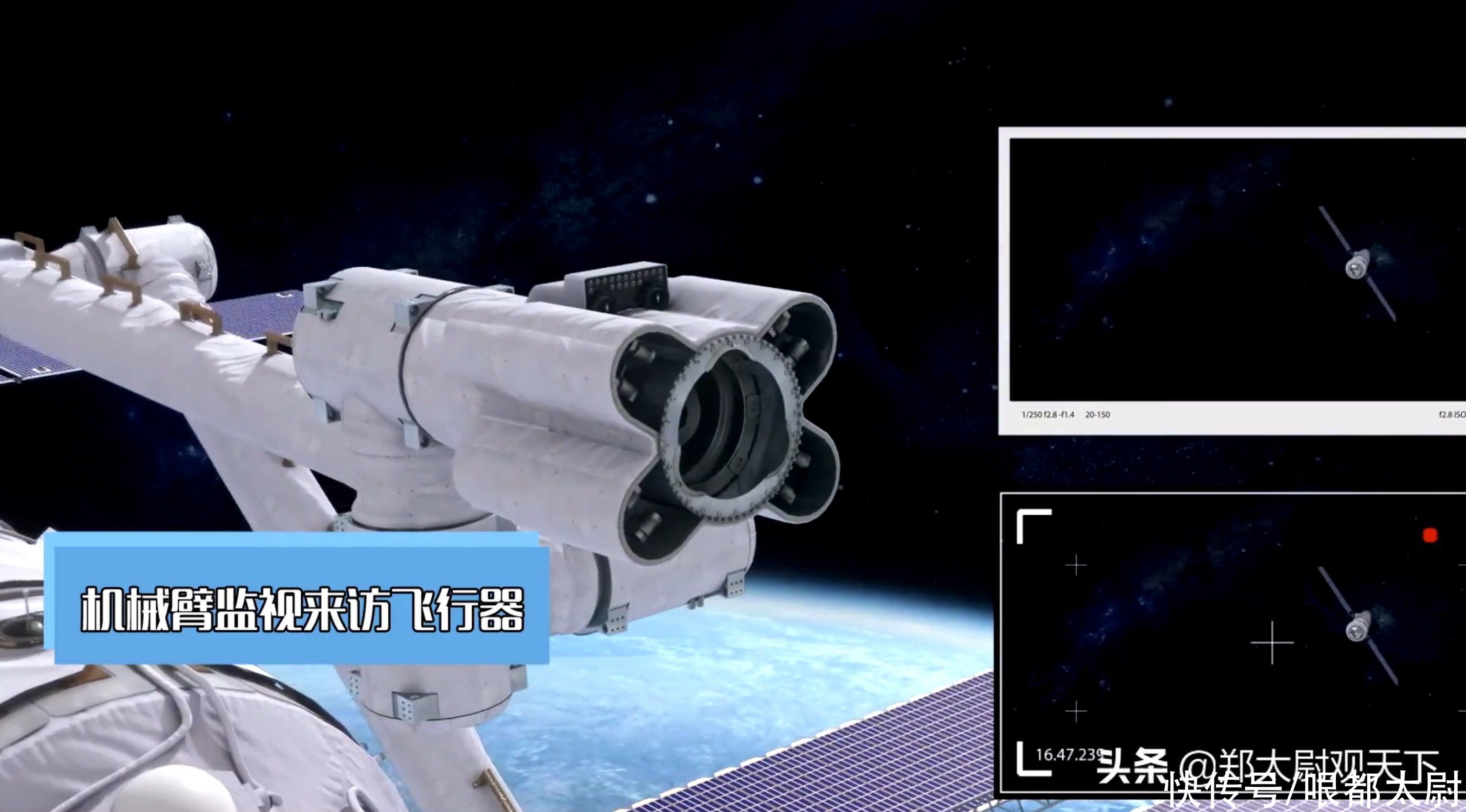
文章插图
另外美国机械臂尽管能够爬行,但是当它移动到新的“锚点”,只能够获得数据连接和视频信号连接,此外就是基本的运转的动力,因此美国的机械臂只能爬行观察情况,但不具备载荷抓握的能力,而我国的机械臂和舱外锚点则进行了进一步的改进,使得机械臂在移动后也具备了载荷抓握的能力。这就意味着我国空间站机械臂可工作的范围极大扩展。实际这种更为全面的机械臂爬行功能,也是美国在未来探月的星门空间站所要实现的功能。
我国通过空间站机械臂的研制,实现了空间机器人产品的全流程研制,培养了一大批人才,实现了空间机器人系统研制体系的全方位构建。不但能够满足空间站机械臂的使用,而且还应用到月球探测采样机械臂、火星车移动系统等空间机器人系统研制需求,同时这些技术还可满足外骨骼机器人等军民融合方面的应用拓展。
推荐阅读







- 中国经济网 航天工程董事长唐国宏辞职 姜从斌接棒
- 通信技术 轮值董事长徐直军:华为2009年已开始研究5G
- 上戏 黄景瑜烧烤师傅逆袭顶流,素人起家偶像硬汉通吃,成长之路不简单
- 大循环 淡水资源紧缺,为何不拦截长江和黄河自用,而是任其流入大海?
- 湖南卫视 黄晓明再当店长,龚俊、丁真疑加盟,《中餐厅5》能大爆吗?
- 韩安冉 变形计:她是长相最漂亮富家女,拒绝像韩安冉一样,还拒绝《青你2》
- 火箭 长三乙火箭送风云四号02星升空 金牌火箭开启新一轮高密度发射
- 德克斯特 国际空间站机械手臂遭太空垃圾撞击,幸好没事
- 太空垃圾 太空垃圾“击伤”国际空间站机械臂
- 运载火箭 长征七号运载火箭缘何推迟发射