网络|麻省理工学院的最新发明:机器人帮你找回丢失物品!
文章图片
一位忙碌的上班族准备走出门 , 却发现他们把钥匙放错了地方 , 必须翻找成堆的东西才能找到它们 。 他们迅速筛选杂物 , 希望自己能弄清楚哪堆东西下藏着钥匙 。
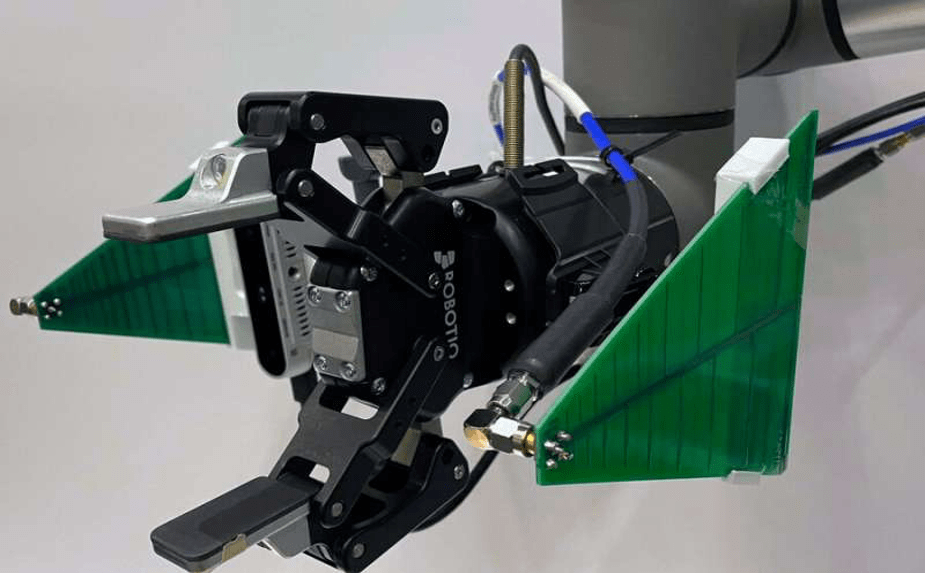
麻省理工学院的研究人员创造了一个机器人系统 。 该系统RFusion是一个机器人手臂 , 夹子上连接着摄像头和射频(RF)天线 。 它将天线的信号与相机的视觉输入融合在一起 , 以定位和检索物品 。
研究人员开发的RFusion原型依赖于RFID标签 , RFID标签是廉价的无电池标签 , 可以粘在物品上并反射天线发送的信号 。 由于射频信号可以穿过大多数表面(例如可能遮挡钥匙的脏衣服堆) , RFusion能够找到一堆有标签的物品 。
使用机器学习 , 机器人手臂会自动锁定物体的确切位置 , 移开目标物体顶部的物品 , 抓住物体 , 并确定它捡到了正确的东西 。 相机、天线、机器人手臂和人工智能完全集成 , 因此RFusion可以在任何环境中工作 , 而无需特殊设置 。
文章图片
虽然寻找丢失的钥匙很有帮助 , 不过RFusion将来可以有更多更广泛的应用程序 , 例如整理仓库中成堆的货物以完成订单 , 在汽车制造厂识别和安装组件 , 或帮助老年人在家里完成日常任务 , 尽管目前的原型还不足以快到应用于这些用途 。
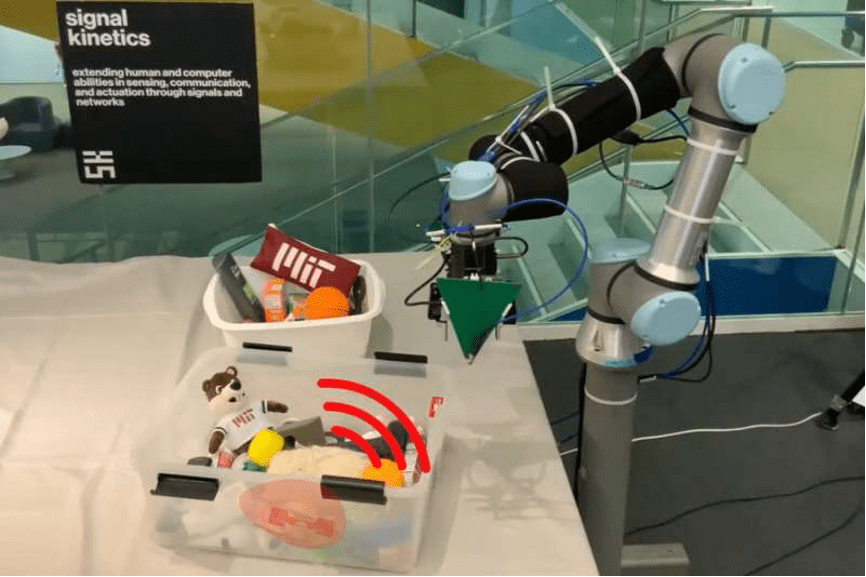
“能够在混乱的世界中找到物品的想法是一个我们多年来一直在研究的开放式问题 。 拥有能够搜索一堆东西的机器人是当今工业界日益增长的需求 。 ”电气工程和计算机科学系副教授、麻省理工学院媒体实验室信号动力学小组主任Fadel Adib说:“现在 , 你可以把它想象成一种关于类固醇的Roomba , 但短期内 , 这可能在制造和仓库环境中有很多应用 。 ”
发送信号
RFusion使用天线搜索物体 , 天线将信号从RFID标签上弹出(就像阳光从镜子上反射出来一样) , 以识别标签所在的球面区域 。 它将该球体与相机输入相结合 , 从而缩小了物体的位置 。 例如 , 该项目无法位于表中空的区域上 。
但一旦机器人大致了解了物品的位置 , 它就需要在房间里到处摆动手臂 , 进行额外的测量 , 以得出确切的位置 , 这既慢又低效 。
研究人员使用强化学习来训练一个神经网络 , 该网络可以优化机器人到达目标物品的轨迹 。 在强化学习中 , 该算法通过反复试验与奖励系统进行训练 。
“这也是我们的大脑学习的方式 。 我们从老师、父母、电脑游戏等那里得到奖励 。 同样的事情发生在强化学习中 。 我们让机器犯错或做正确的事情 , 然后进行惩罚或奖励 。 这就是机器学习如何学习一些很难建模的东西 。 ”Boroushaki解释道 。
推荐阅读







- 网络|天津联通全力助推天津市入选全国首批千兆城市
- 网络化|工信部:2025年建成500个以上智能制造示范工厂
- 视点·观察|张庭夫妇公司被查 该怎样精准鉴别网络传销?
- 数字化|70%规模以上制造业企业到2025年将实现数字化、网络化
- 人物|俄罗斯网络博主为吸引流量 闹市炸毁汽车 结果够“刑”
- 协同|网文论︱网络文学与AI写作:人机协同演化时代的文学之灵
- 周鸿祎|网络安全行业应提升数字安全认知
- 安全风险|网络安全行业应提升数字安全认知
- 海康威视|智能家居战场又添一员,海康威视分拆萤石网络上市,半年营收20亿 | IPO见闻
- 网络应用|免费、不限速 8大网盘今年都已提供无差别速率服务