AI|人形机器人登Sicence子刊封面:走钢丝玩滑板,还会飞上天( 二 )
LEO的肩部安装有4个对称放置的螺旋桨,用来稳定和控制行走和飞行动作 。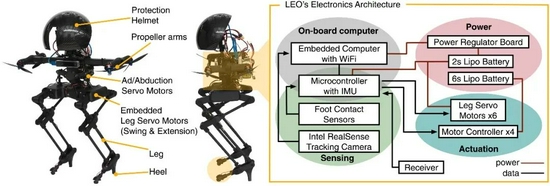
文章图片
▲LEO的电子和机械部件
LEO可以通过其机载计算机和传感器套件完全自主运行,根据需要穿越的障碍物类型,它可以选择使用步行或飞行,或根据需要将两者混合使用 。
在行走过程中,LEO的螺旋桨确保其能够在行走时保持直立,腿部致动器通过改变腿的位置以向前移动机器人的重心,从而实现行走 。在飞行中,LEO能够单独使用螺旋桨,像无人机一样飞行 。
03.
会滑滑板、走钢丝,高空作业是最大应用方向
得益于其混合运动的能力,研究人员发现它可以完成一些常规机器人难以完成的动作,比如在绳索上行走、滑滑板等 。并且它还具有极高的抗干扰能力,在达3.8 m/s的风速下也能保持稳定 。
文章图片
▲LEO滑滑板绕过障碍
研究人员在论文中谈道:“也许最适合LEO的应用是那些涉及高空作业的应用,这些工作对人类来说通常是危险的,需要机器人来替代 。”
例如,目前高压线路检测依靠专业人员来完成,他们不仅要远距离检查线路,还要走在线路上进行检查和维修 。利用LEO无需再派遣人员爬上电线,只用让机器人飞到高压线路上并沿着电线行走来进行检修工作,这会降低检修成本,也能够降低人员坠落伤亡的可能 。
除了这些作用之外,为LEO设计的技术还可以促进自适应起落架系统的发展 。研究团队设想,未来的火星旋翼机可以配备腿式起落架,以便它们降落在倾斜或不平坦的地形上时可以保持身体平衡,从而降低在着陆失败的风险 。
接下来,该团队计划通过完善腿部设计使其更加坚固来提高LEO的性能,以支撑更重的机器人并增加螺旋桨的推力 。此外,他们还希望LEO能够更加自主,以便机器人在崎岖的地形上行走时,能够了解腿部支撑了多少重量,需要螺旋桨提供多少推力 。
研究人员还计划为LEO配备一种新开发的控制算法,该算法利用深度神经网络控制无人机的着陆,让机器人更好地了解环境,自行决定步行、飞行或混合运动的最佳组合,以最安全、最低能耗的方式从一个地方移动到另一个地方 。
04.
结语:能跑能飞,让双足机器人应用空间更广阔
双足机器人因具有人类的外观,能够模仿人类完成各项工作 。但是受限于环境与地形条件,双足机器人在很多情况下的运动会受到限制 。
LEO通过将行走与飞行两种运动状态相结合,让双足机器人能跑也能飞,打破了地形这一障碍,使其拥有更加广泛的应用空间 。
推荐阅读







- 下架|APK Installer 和 WSATools 同时躺枪:冒牌应用登陆微软应用商店
- 人物|马斯克谈特斯拉人形机器人:有性格 明年底或完成原型
- 飞腾|原生版微信登陆统信UOS应用商店,已适配X86/ARM/LoongArch架构
- 硬件|Yukai推Amagami Ham Ham机器人:可模拟宠物咬指尖
- 外置|好消息!巨好用的国球汇限定·汇星3耀眼登场,限时送福利!
- 首场|观测条件极佳!新年首场流星雨1月4日登场
- 王者|布局手术机器人赛道,谁是王者? | A股2022投资策略⑩
- 孙自法|中国科技馆“智能”展厅携多款机器人亮相 喜迎新年和人机共融时代
- 国际|微创血管介入手术机器人获国际创业大赛冠军,获价值千万元奖励
- 观测|观测条件极佳!新年首场流星雨1月4日登场