【定位|杭电研究生解决无人机送货“微观交叉定位”难题】疫情期间 , 为了实现“无接触” , 无人机送货成迫切需求 。 但无人机送货也面临“找路”难题 , 比如在局促小区 , 要把快递送到某幢楼某单元门口 , 鉴于这幢楼和相邻楼外形相似 , 甚至两幢楼相邻参照物也极为相似 , 无人机导航很容易迷航 。 我校自动化学院(人工智能学院)智能信息处理实验室博三学生王廷宇题为《Each Part Matters: Local Patterns Facilitate Cross-view Geo-localization》的论文 , 提出“交叉定位”方案 , 有望解决这一工程技术难题 。 这篇论文发表在《IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY》期刊 , 为SCI一区期刊 。
文章图片
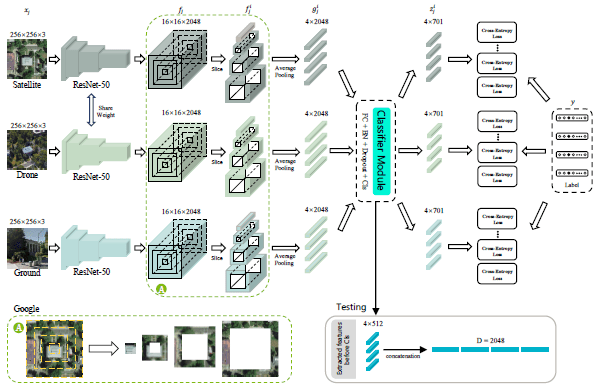
说起来容易 , 做起来难 。 卫星图和无人机图相互比对 , 做起来并不容易 。 太空中拍到的只能是大概的位置 , 用的是经纬度的坐标 , 是俯拍图 , 但无人机不是经纬度坐标 , 而且无人机为了到达目标比如比较隐蔽的目标 , 飞行轨迹可能异常复杂 , 这个时候拍出的图片可能是侧视图或者是其它角度的(航拍)图 。 这就意味着即便是同样的物体 , 卫星图和无人机图因为拍照角度不同 , 拍入的周围物体和环境不同 , 同样的物体乍看起来会给人“不一样”的感觉 。
而王廷宇设计的这个模型 , 并不需要两个视角图像的拍摄方向相同 , 即不需要特意使目标周边信息在两张图像中的位置相同 , 也能进行有效的比对 。 这样就可以使得无人机在飞向微观目标物时 , 卫星导航与无人机拍照“认路”可以互相配合 , 并不矛盾 。
“这个模型的最大亮点就是 , 实现太空坐标和地球坐标还有无人机自定义坐标之间的灵活转换 , 这就是交叉定位的内涵 。 ”王廷宇表示 , 他提出的模型 , 也可以很方便的嵌入到已有的其它导航“认路”方法中 , 并提高现有方法的性能 。

文章图片
文章图片
据了解 , 此论文的发表也得到了悉尼科技大学杨易教授和悉尼科技大学在读博士郑哲东的很多指导和帮助 。
来源:杭州电子科技大学
推荐阅读


- 定义|时间走向二维,基于文本的视频时间定位新方法兼顾速度与精度
- 系列|【穿戴】小米WatchS1官宣12.28发 圆形表盘全新系列定位
- 京东方|消息称京东方 2022 年上马曲面 ADS 硬屏,压低 VA 曲面屏定位
- 定位|魅族17大清仓,骁龙865+64MP仅2099,你会入手吗?
- IT|现代IONIQ 7渲染效果图曝光 预计2024年推出/定位三排座的中型纯电SUV
- China|中国移动建反诈系统:可30分钟内封杀诈骗设备 定位地点
- 定位导航|自主创新?追求卓越
- Apple|女子iPhone 13掉落网约车被司机关机 定位功能协助其找回
- 功能|南都实测应用获权:拒绝十次还弹窗,五分钟内读定位超两千次
- Hao|英伟达研究生奖学金名单公布:多位华人获选,每人5万美元