文章图片
近年来 , 内河无人船因其潜在的应用价值而受到广泛关注 , 不同于海面无人船和路面自动驾驶场景 , 内河行驶的无人船的定位和感知面临着独特的挑战 。 欧卡智舶联合清华大学与西北工业大学的研究学者于近日公开了USVInland数据集 , 该数据集是第一个内河场景下多传感器的无人船数据集 , 旨在促进无人船领域相关研究 。
数据集论文已经被IEEE Robotics and Automation Letters(RA-L)接收 , 并将在IEEE International Conference on Robotics and Automation(ICRA)2021上进行展示 。
论文地址:
https://arxiv.org/abs/2103.05383
下载链接:
http://www.orca-tech.cn/datasets
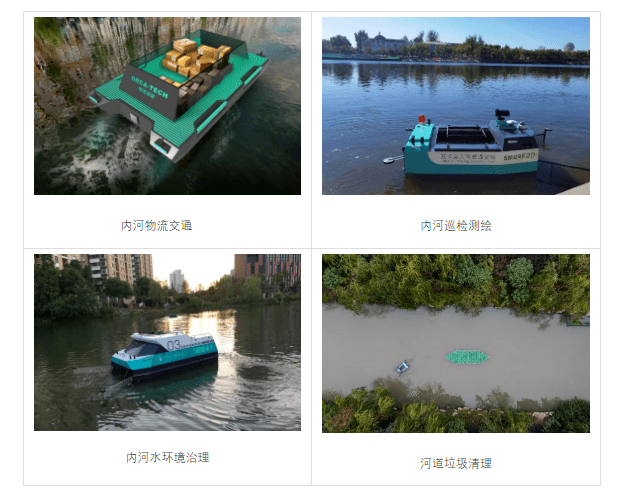
▎背景介绍 随着自动驾驶技术的发展 , 自动驾驶场景逐渐由路面扩展至水上 , 无人船(Unmanned Surface Vehicle,USV)及其相关应用成为近年来研究热点之一 。 其中 , 内河无人船具有极大的应用价值 , 如内河自主运输 , 测绘 , 水质检测 , 和河道垃圾清理等 。 不同于海面无人船 , 内河相对狭窄和复杂的环境 , 对无人船的定位和感知带来了新的挑战 。
文章图片
无人船在内河的多种应用
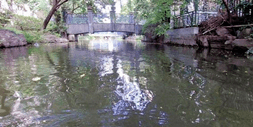
在狭窄的内陆水道中 , GPS信号有时会由于河岸植被、河道旁建筑以及桥梁的遮挡而减弱 。 在这种情况下 , 内河航道的准确定位与导航 , 依赖于对无人船与周围环境的感知 。 此外 , 内河场景更为复杂 , 必须确保无人船与河岸和其他障碍物保持安全距离 。 因此 , 与道路上的自动驾驶类似 , 基于激光雷达、相机和毫米波雷达等传感器的同步定位与建图(SLAM)、立体匹配和水岸分割等任务被引入到内河无人船的应用中 。
文章图片

文章图片
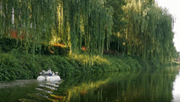
有桥及狭窄的复杂内河场景
而在内河中 , 水面上的雾和强光反射会降低激光雷达探测精度;对于视觉系统 , 水面雾气和强光反射 , 岸边物体的反射和雨滴引起的涟漪也会带来干扰 。 此外 , 不同于路面车辆 , 水面上船只的横向漂移较大 , 船只的运动模型更为复杂 , 给精确定位带来新的挑战 。 因此 , 对于内河无人船 , 路面自动驾驶的通用策略是不可行的 。
在路面自动驾驶领域 , 近年来涌现出了如KITTI , Oxford RobotCar , nuScenes等公共数据集 , 大大促进了路面自动驾驶领域相关技术的发展 。 而无人船领域的公开标准数据目前还相对缺失 。
▎数据集介绍 USVInland是第一个真实场景下多传感器、多天气条件下的内河无人船数据集 。 在不同的内陆河道场景中 , 共采集了27段原始数据 , 总行驶距离超过26公里 , 发布的数据中包含了SLAM、立体匹配和水岸分割三项任务 。

文章图片
数据集中包含不同天气及不同内河场景示例图
数据采集平台搭载的传感器包括激光雷达 , 双目相机 , 以及GPS和IMU几种自动驾驶领域常用传感器 。 除此以外 , 采集平台上还配备了三个毫米波雷达提供周围环境点云数据 。 与图像和激光雷达相比 , 毫米波雷达对天气以及光照条件的鲁棒性更强 , 能提供多普勒速度信息 , 且成本较低 , 近年来在自动驾驶领域应用广泛 。 不同传感器之间完成了时间同步和空间标定 。

文章图片

文章图片
文章图片
USVInland数据集多传感器采集平台
受KITTI的启发 , USVInland数据集引入了SLAM、立体匹配和水岸分割任务 。 对已有的常用算法 , 如SLAM中的LOAM , Lego-LOAM , ORB-SLAM , 立体匹配中的SGBM , 以及用于水岸分割的语义分割网络DeepLab v3+ , 文中给出了在内河场景数据集上的实验结果 。 结果表明 , 受到内河特殊场景的影响 , 常用算法的性能无法满足内河无人船安全行驶的需求 。
文章图片
文章图片
USVInland数据集中多传感器SLAM数据

文章图片
USVInland数据集水岸分割示例图
▎总结 针对内河无人船实际应用的需求 , 研究者构建了第一个多传感器、真实场景下内河无人船数据集USVInland 。 期待通过该数据集的发布 , 为无人船及水面自动驾驶领域相关研究者提供一个平台和基准 , 推动解决内河无人船在真实场景应用中面临的挑战 。 USVlnland主要被设计用于提升无人船在真实内河水域场景下的各项作业能力 , USVlnland也是国内首个内河水面无人驾驶数据集 , 对于国内内河水面无人驾驶技术的发展具有划时代的意义 。 现在 , 欧卡智舶已经把 USVlnland数据集免费开放给全球各个国家的技术研究者使用 , 期待 USVlnland 能够启发更多研究人员进行真实内河水域场景下无人船发展的研究 。
数据集下载链接:
http://www.orca-tech.cn/datasets
论文全文地址:
https://arxiv.org/abs/2103.05383
更多细节请见论文 。
关于 Plug and Play 中国 Plug and Play 前身始于 1998 年的硅谷斯坦福大学路 165 号 , 先后成功早期投资和孵化包括 Google、PayPal、Dropbox 在内的多家互联网行业科技巨头公司 。
Plug and Play 正式于 2006 年在硅谷成立 。 经过十余年的发展和超过 20 年的长期积累 , 目前在全球 30 个国家和地区建立了创新生态空间和区域办公室;年平均进行早期科技投资超过 250 笔 , 先后累计投资初创企超过 1,150 家 , 累计为超过 400 家全球 500 强企业提供联合创新服务 , 年平均举行初创企业和大企业间的对接交流活动 1,000 余场 。
【全球|投后企业动态 | 重磅!欧卡智舶发布全球首个城市内河无人驾驶数据集】“即联即用中国(Plug and Play China)” , 成立于 2015 年 , 立足北京——中国总部 , 布局上海、深圳两大区域创新中心 , 联动南京、武汉、无锡、南通、佛山、广州、青岛等城市创新合作伙伴开展中国创新业务 。 我们开设企业创新服务、城市创新服务、投资和创新空间四大业务板块 , 构建了中国领军的创新生态平台 , 覆盖线上和线下创新平台 , 并为之配套构建了包括大企业、初创公司、城市伙伴、风险投资机构、高校科研院所、行业导师等多维度的创新生态伙伴体系 。 迄今已服务了近 100 家行业领军企业 , 累计孵化加速 4,000 余家创业公司 , 并投资了包括 ApplyBoard、AutoX、非夕科技、纵行科技、银基安全、大界机器人、Authing、优时科技等超过 150 家科技创新企业 。
推荐阅读







- 浦峰|冬奥纪实8k超高清试验频道开播,冬奥结束后转入常态化运转
- 代码|GGV纪源资本连投三轮,这家无代码公司想让运营流程变简单
- 机身重量|黑科技眼控对焦23年后回归,升级! 江一白解读EOS R3
- 测试|图森未来完成全球首次无人驾驶重卡在公开道路的全无人化测试
- ASUS|华硕预热ROG Flow Z13:称其是“全球最强悍的游戏平板”
- Insight|太卷了!太不容易了!
- IT|全球汽车行业价值两年突增至3万亿美元 中国电动车企立大功
- 人物|印度人接管硅谷的背后:技术军团整体作战
- IT|全球供应25亿剂疫苗 科兴上半年营收110亿美元
- 最新消息|宁德时代再投240亿元扩产宜宾基地