光学 蜘蛛机器人在轨组装空间望远镜,基建狂魔上太空,真的靠谱吗?
最近,央视曝光的中科院长春光机所下一代空间望远镜让外界大吃一惊,其科幻的外形如同星际战舰、轨道激光炮或者是太阳帆飞船,提出的太空蜘蛛机器人和在轨组装技术,更是大大领先世界先进水平。不过,由于目前它还只是一个规划,准备未来5到10年内发射,很多人在问,它真的能变成现实吗?
这个太空望远镜也太科幻了
实际上,它完全可以变成现实。空间望远镜的在轨组装技术,并非我们首先提出来的,而是美国“韦伯”望远镜JWST。在轨组装技术不但避开了单一镜面形式的技术难度和加工制造成本,同时突破了运载器整流罩尺寸的限制,在高分辨率、轻质和模块化方面有着无与伦比的优势,是未来空间望远镜的发展趋势。
文章插图
“韦伯”望远镜
不过,“韦伯”由于屡屡跳票,已被称为“鸽王”,它最新的计划是今年10月份发射,但是鉴于疫情的原因,很大可能会继续推迟。而且它的镜面不够大,相比在轨组装,更是是一种折叠展开技术。中科院长春光机所下一代空间望远镜的水平则高得多,镜面也要大得多。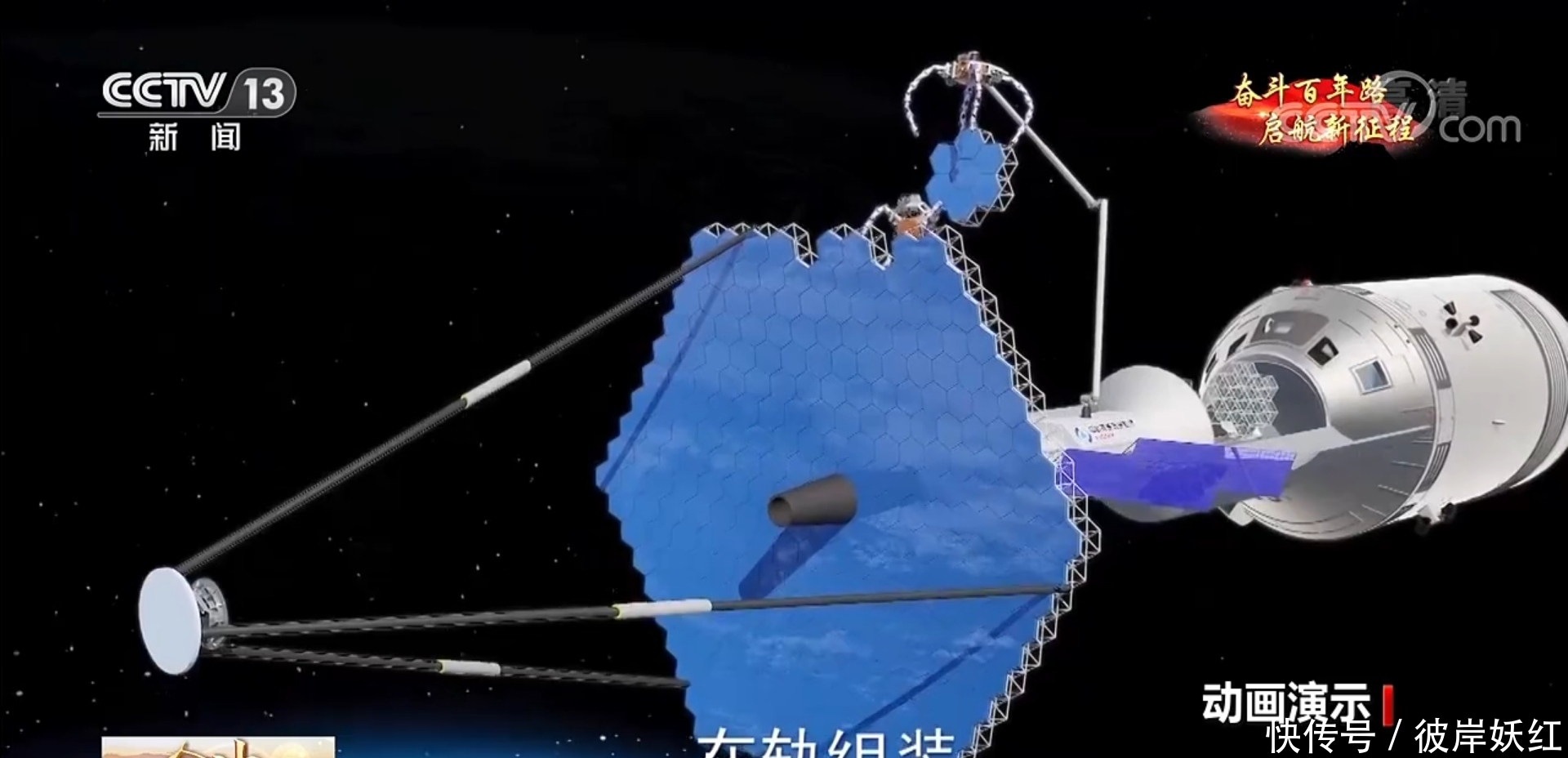
文章插图
咱们的比“韦伯”可大多了
不过,大面积的在轨组装技术,也不是没有问题的,比如有观点认为它主要依靠空间站上的太空机械臂组装,而机械臂末端有45mm的误差,对于望远镜那么精密的设备来说,可能是致命,为解决这个问题,我国科学家也想了很多办法,其中包括光学镜面的校准过程。
文章插图
光学镜面的校准至关重要
光学镜面的校准包括初始装配、粗校准和精校准,在初始装配阶段,就要将误差控制在微米级,其中涉及的单元镜之间的捕获点预测、碰撞缓冲以及锁紧系统。在单元镜捕获阶段,我国科学家提出异体同构锥杆式捕获系统,利用笛卡尔坐标系的几何映射理论,建立“双点接触”碰撞点预测模型,通过位移曲线变化,将相对位置误差控制在0.015mm范围,远远小于机械臂45mm的误差。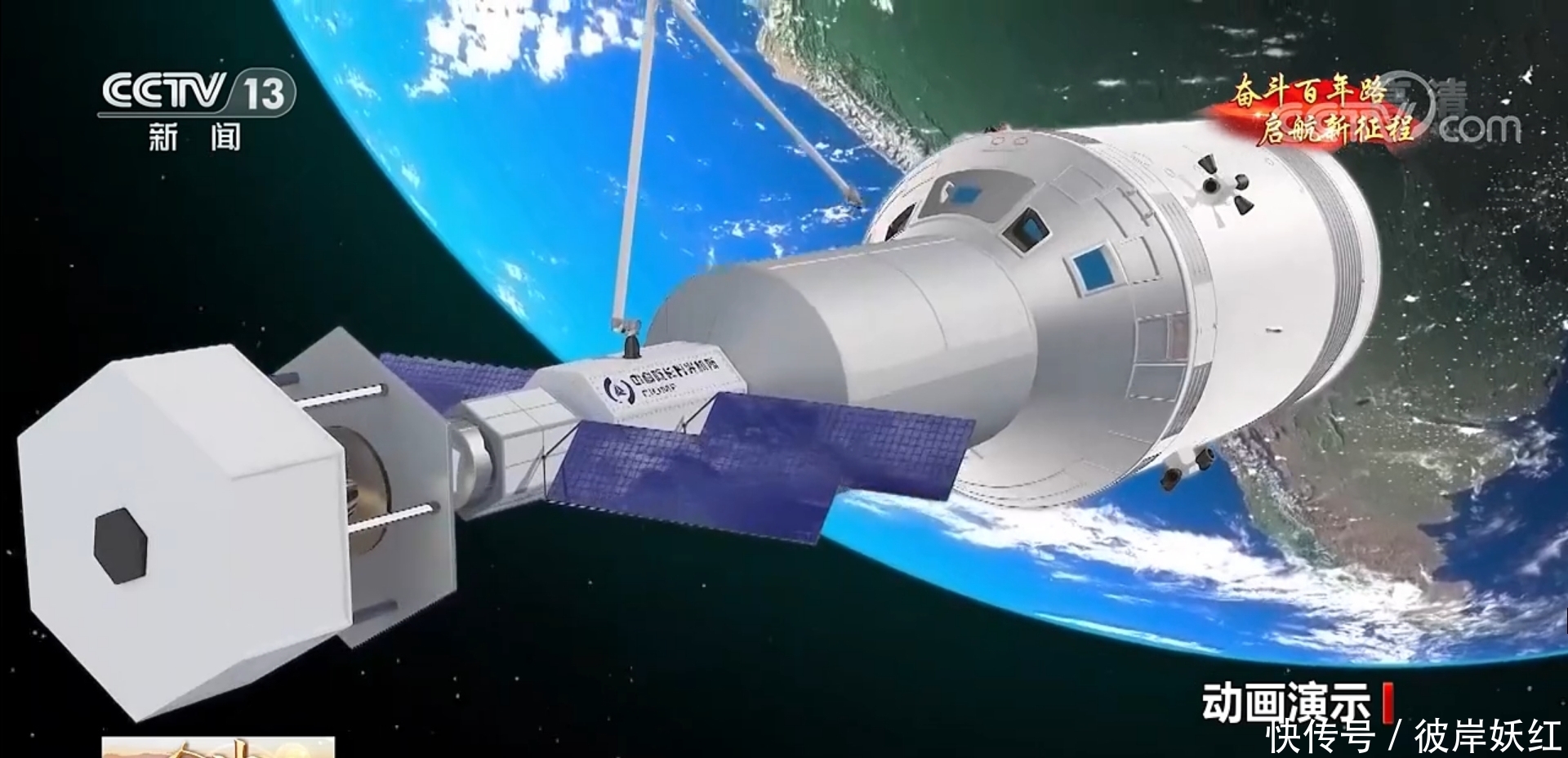
文章插图
机械臂的误差无法满载光学望远镜的在轨组装
而单元镜的在轨安装过程中,碰撞冲击影响不可避免,我国科学家建立了“双弹性”被动式缓冲理论模型,根据异体同构锥杆式碰撞特性,采用导向杆头和接纳锥壁柔性化设计,运用牛顿-欧拉动力学方程,分析了捕获阶段所需要的缓冲能力,根据半无限体表面手法像集中力的叠加接发,得出该模型的接触碰撞过程中最大的缓冲变形和最大接触应力,变形值随冲击力可增大3倍,冲击力最大可降低58%。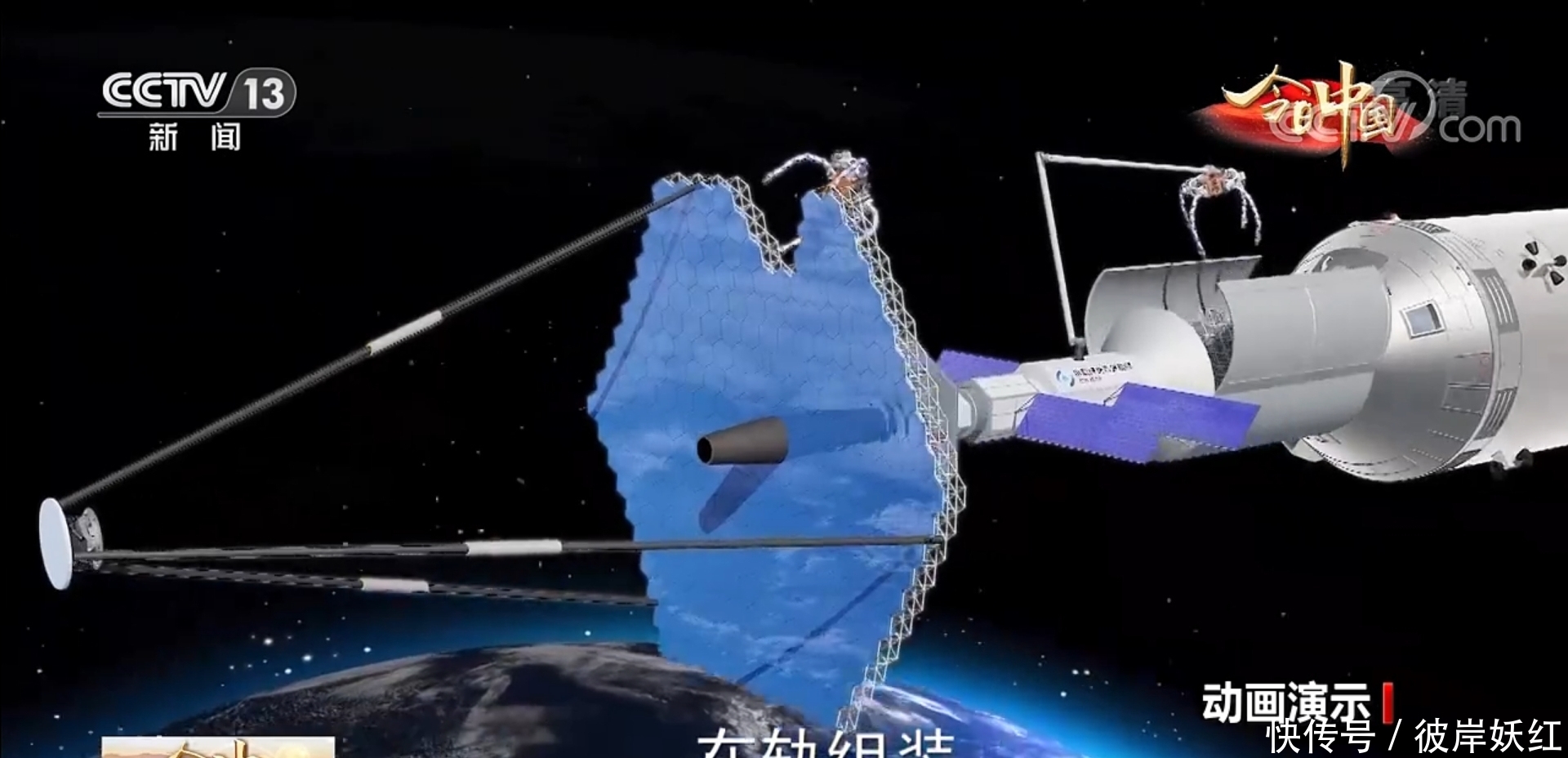
文章插图
捕获时冲击力最大可降低58%
最后一关的锁紧装置,我国科学家提出了一种被动式轴向锁紧系统,通过锁紧齿与导向杆的弹性啮完成锁紧,建立了柔性锁紧系统理论模型,并通过可视化试验验证了锁紧模型的实际锁紧装配误差,试验结果完全合格。而这还只是初始装配过程,接下里的粗校准和精校准过程更为复杂,是航天领域的最高机密之一,在这里就不讨论了。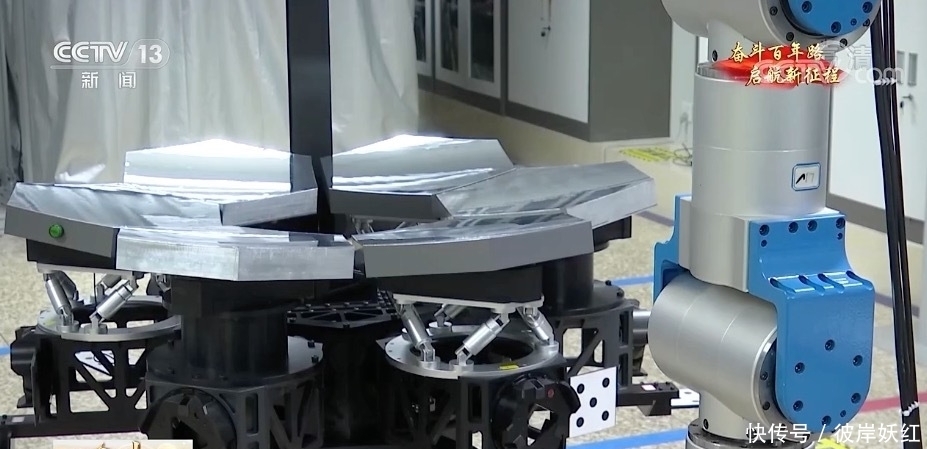
文章插图
被动式轴向锁紧系统
总而言之,此次央视曝光的中科院长春光机所下一代空间望远镜,是一种非常先进的设计,远不止我们看到的科幻外形和太空蜘蛛这么简单。但即便再科幻,它也并非空想,而是我国科学家一步一步脚踏实地得来的,所有的成绩背后都是难以想象的艰辛,而一旦获得成功,将奠定我国航天未来领先世界的格局。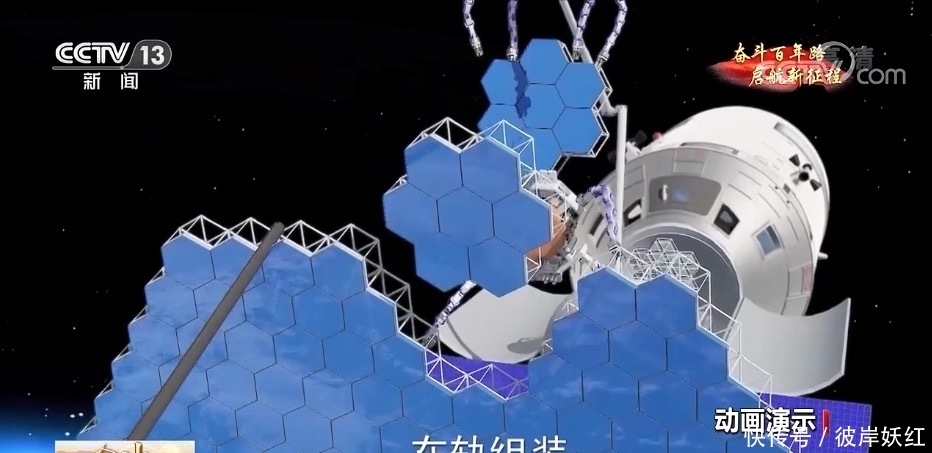
文章插图
【 光学|蜘蛛机器人在轨组装空间望远镜,基建狂魔上太空,真的靠谱吗?】牛PLUS
推荐阅读







- 机器人 地球上最后的“通才”——达芬奇,发明过机器人,估算出地球直径
- Tencent 鹅厂机器人“穿着”轮滑鞋大玩前空翻 连人都不敢轻易尝试
- Tencent 腾讯发布轮腿式机器人Ollie 能完成360°自由转体
- 硬件 DHL将在2022年前部署2000台Locus机器人设备
- Baidu 集度汽车百日谈:百度准备造辆什么车?一个“四轮机器人”
- 人物 Project Loon前CEO已加盟自主机器人交付企业Starship
- tomy 日本希望将球形变形机器人送上月球
- 巨人 《爱、死亡和机器人》第二季各集优劣大排序,如下:8324715
- 技术流 《爱,机器人与死亡》S2释出,口碑不如S1,评分直线下降
- 美国宇航局 日本预计2029年将球形机器人送上月球:可自动“变身”行驶,捕捉月表图像