Nature封面:浙大软体机器人成功挑战马里亚纳海沟,水下10900米运动自如
文章插图
在 10900 米深的马里亚纳海沟中,软体机器人的双鳍拍打动作,图片来源@Nature
文丨学术头条
比陆地更辽阔的是海洋,海水覆盖了地球约 71% 的表面积。不过,海洋学者认为人类只探索了其中的 5% 而已。人们经常对较浅的海洋进行勘探,但由于极端的静水压力,深海区域基本仍是一片神秘领域。
目前,设计精良的水下机器人在深海任务中具有出色的机动性和功能性,勘探深度能达到 3000-11000 米,比如我国自主研发的 “蛟龙号”“奋斗者号” 等载人潜水器,在深海探矿、海底高精度地形测量、可疑物探测与捕获、深海环境与生物考察等任务中都扮演着关键角色。
但是,这些深海潜水器通常需要特制的压力容器或压力补偿系统来保护内部机电系统,考虑到海底极端条件下结构破坏的风险,深海勘探仍然具有危险性和挑战性。然而,大自然是神奇的,没有耐重压系统的深海生物却可以在极深的海域繁衍生息,灵活游走。
受深海生物特性的启发,来自浙江大学、之江实验室的科研团队及其合作者开发了一种能用于深海探测的无线自供能软体机器人,他们通过在马里亚纳海沟最深10900 米处和南海最深 3224 米处进行实际测试,验证了这种机器人具有极好的耐压和游泳性能。
相关研究论文以 “Self-powered soft robot in the Mariana Trench”(马里亚纳海沟里的自供能软体机器人)为题,于 3 月 4 日发表在《自然》(Nature)杂志上。
文章插图
(来源:Nature)
灵感来源于一种深海鱼论文里介绍的这种深海机器人,是一种典型的仿生装备与系统。目前,生活在中等海洋深度(约 1000 米)的软体生物,如章鱼和水母等已被广泛研究,它们的适应能力启发了很多水下软体机器人的设计,为深海探险提供了很多有前途的方法。
这类软体机器人的性能很大程度上取决于软启动器,包括介电弹性体(dielectric elastomers,DEs)、水凝胶和射流装置等,近年来的许多研究表明,具有扑翼、波动、喷射等推进方式的柔性机器人具有良好的游泳性能。
尽管如此,这类机器人的动力和控制电子系统仍然需要笨重而坚硬的容器来抵御深海极端压力,一种没有刚性容器、能在极端深海游泳的、有压力弹性的软机器人还没有被开发出来。
浙江大学李铁风、李国瑞及其合作者设计开发的这款软体机器人,灵感则是来自钝口拟狮子鱼(Pseudoliparis swirei)。早在 2014 年,科学家就在马里亚纳海沟中约 7000 米处深度捕获到了这种鱼类,据了解,钝口拟狮子鱼还创下了一项人类拍到活体鱼类的最深纪录 ——8178 米。
文章插图
图|钝口拟狮子鱼(来源:Mackenzie E. Gerringer)
马里亚纳海沟深处的压力有多大?Nature 文章中有一个形象的描述,类似于把一整座埃菲尔铁塔的重量全都压在人类大脚趾上。在那种寒冷、黑暗和极压的环境下,高压能压碎人的骨头,压扁钢铁潜水设备,而这些鱼却表现出了奇好的生存性和移动性。
所谓“适者生存”,这种鱼在身体特征上包括一个分布的头骨和能拍打的胸鳍,由软骨和细胞膜组成的骨架等,这指导了李铁风、李国瑞团队及其合作者进行一种创新的深海软体机器人设计。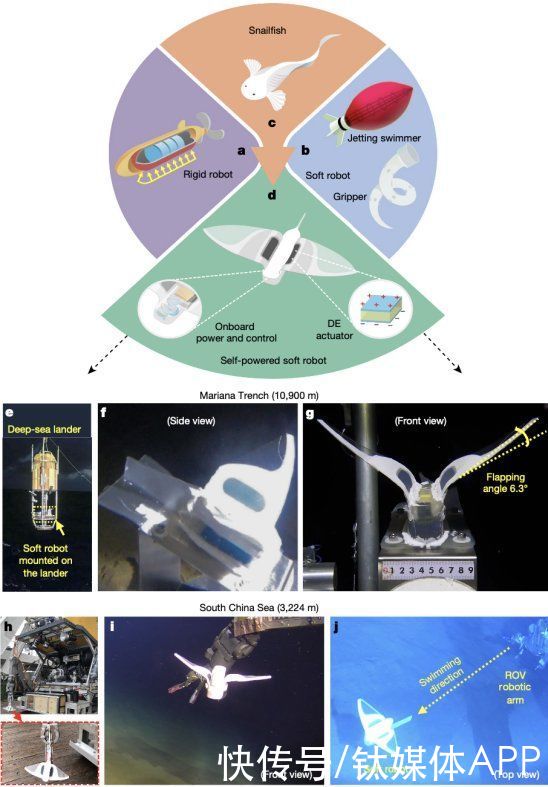
文章插图
图|机器人设计与深海试验(来源:Nature)
据论文描述,研究人员已对这种软体机器人进行了多方位测试报告。它被安装在深海着陆器上,在马里亚纳海沟 10900 米深度的现场测试中成功启动,这个软机器人内部自带容量为 2500mAh 的锂离子电池和高压放大器用来自动供电,团队使用受保护的摄像机和深海着陆器上的 LED 灯记录了试验过程,在这次测试中,机器人没有从着陆器中释放出来,在没有压力容器的情况下,扑鳍驱动保持了 45 分钟。
在中国南海的现场试验中,软体机器人由遥控潜水器(ROV)携带到 3224 米的深度。在 8kV 交流电压和 1Hz 的驱动下,该机器人以 5.19cm 每秒(即每秒 0.45 体长)的速度拍打双鳍运动,成功实现自由游动。
文章插图
图|软体机器人在 3224 米深海游动(来源:Nature)
独特的电子和机械设计据了解,这种机器人设计成功的关键之一是压力弹性电子元件。传统的水下航行器需要金属材料制成的水密外壳,以承受深海高压,这些外壳的厚度和尺寸必须增加,以适应更大的深度。但在研究团队此次设计的机器人中,精密的电子元件被嵌入并分布在柔软的硅树脂基体中,这种设计消除了对耐压外壳的需求。
推荐阅读







- 封面新闻 四川造“专属装备” 让“太空快递员”天舟二号跑得更安心
- 封面新闻 “祝融号”火星车设计者为封面新闻撰文 揭秘火星车背后的故事
- 商业封面 物业的枷锁:如何让普通母鸡“下金蛋”?
- 封面商业 荔枝“大年”行情差,产量280万吨,低价愁坏果农
- 新女报 领秀重庆·封面人物丨詹庆博士:做有影响力的家族传承领航者
- 电子 浙大学者发现电子自旋操控的高速开关,可用开发自旋场效应晶体管
- 楼市资本论 从钟楼到金辉环球中心,万亿级西安城市封面焕新
- 映真 8年前,在杭州图书馆读书的拾荒者,浙大毕业为何沦为这般境地?
- Baby自曝最新期跑男封面照表示已洞察一切,被网友吐槽:这眼睛瞪的
- IT 一年来的疫情走势怎样了?Nature回顾200篇重磅新冠文章