载人 阿波罗飞船半世纪前载人登月,嫦娥五号后来居上靠的是什么?( 二 )
文章插图
NASA宇航员手控登月舱地面训练画面
即便如此阿波罗11号任务还是出现了意外,在着陆段仅剩60秒时宇航员阿姆斯特朗发现着陆点有一座直径180米的环形山,如果不是他手疾眼快操控飞船越过障碍就会径直撞向环形山。
NASA也有勘测者系列无人登月器,但也都是人为选择开阔平坦区域着陆,并没有自主避障能力。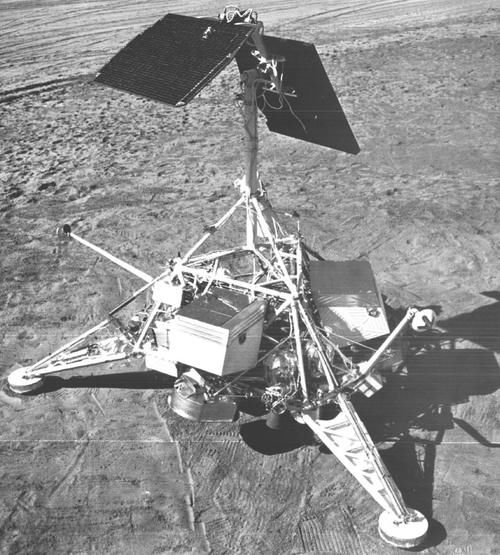
文章插图
勘测者月球探测器(模型)
与阿波罗飞船不同的是,我国嫦娥三号首次登月就应用了全自主避障系统,在整个登月下降阶段没有一丝一毫的人为干预。
想要安全落月首先是建立下降弹道,然后在接近月面时启动避障系统。以嫦娥三号为例,其登月行动是从距离月面15公里高度开始,全程包括着陆准备段、主减速段、接近段、悬停避障段、缓速下降段五大阶段,当着陆器进入接近段与悬停避障段时将基于敏感器获取的平面与立体影像将视野内区域划分网格,尔后基于设计的算法程序选择安全着陆区与着陆点。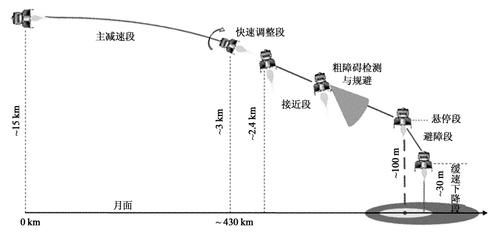
文章插图
嫦娥三号落月各阶段示意图
如果视野内没有理想的安全着陆点,那么算法会根据月面坡度选择最优位置着陆,这种极端情况在嫦娥四号任务中得到了充分验证。
我国嫦娥探月工程从一开始就立足于形成全月面到达能力,攻克月球正面登陆任务后作为嫦娥三号备份产品的嫦娥四号执行的是复杂月背地形登陆任务。
嫦娥四号着陆点位于月球背面艾特肯盆地冯卡门撞击坑,该着陆点周围存在近万米的高度差,嫦娥四号因此修改了登月弹道,由嫦娥三号的倾斜轨迹改为垂直下降,这样一来不仅对动力系统要求更高,机动避障时间也更短,同时着陆点地形相较于嫦娥三号也更复杂。
文章插图
嫦娥四号落月快速调整段
后来成功登月的事实证明我们的自主避障系统是可靠的,尤其是当玉兔二号将拍摄着陆器的高清照片回传地球后发现,嫦娥四号着陆在了一个倾斜坡面上,而周围都是撞击坑,由此可见避障系统自主决策的正确性之高,以及着陆平台优异的稳定性。
文章插图
嫦娥四号在满是撞击坑的复杂月面着陆
要知道在距离月面2米高度发动机要关机,探测器是靠着陆腿吸收最后的冲击能量,通过回传地球的降落视频可知,着陆器本体没有因为倾斜坡面条件下的冲击力产生丝毫跳动,而是非常平稳的落月。
有人会说你拿人家半世纪前的技术对比好意思么?那咱们就说说21世纪的事。
本世纪第一个十年大洋彼岸推出了旨在载人重返月球的星座计划,服务该项目的登月舱计划使用基于激光雷达的自主避障系统,但在奥巴马上台后星座计划被一纸命令终结,这套自主避障系统仅仅推进到方案设计阶段就无疾而终。
文章插图
星座计划登月舱想象图
与星座计划戛然而止相反的是我国嫦娥三号2008年立项,用时5年研发后被成功部署于月球正面虹湾着陆区,而它所用的自主避障系统则是比星座计划的激光雷达更进一步,研制出了基于机器视觉理念的全自主避障系统,配置有导航惯性测量单元、激光测距、光学成像、微波测距、激光三维成像等一系列敏感器。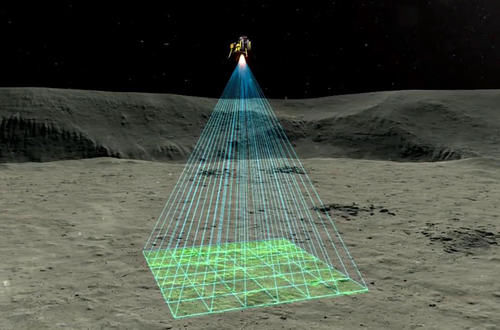
文章插图
嫦娥落月平台激光三维成像
实际上自上世纪八十年代末以来至今大洋彼岸已有三次重返月球计划,老布什最早提出重返月球,最终在小布什任内的星座计划中得以局部推进,奥巴马刚一上任就叫停了星座计划,后来到了如今这任又上马了阿尔忒弥斯重返月球计划,眼瞅着明年又要换人了,最新的阿尔忒弥斯计划又面临延期可能。
就是在这走走停停的过程中,太平洋另一头的我们已经成功实施两次登月行动,并即将在嫦娥五号任务中迎来新质变,两相对比可以发现这是一个多么经典的龟兔赛跑故事。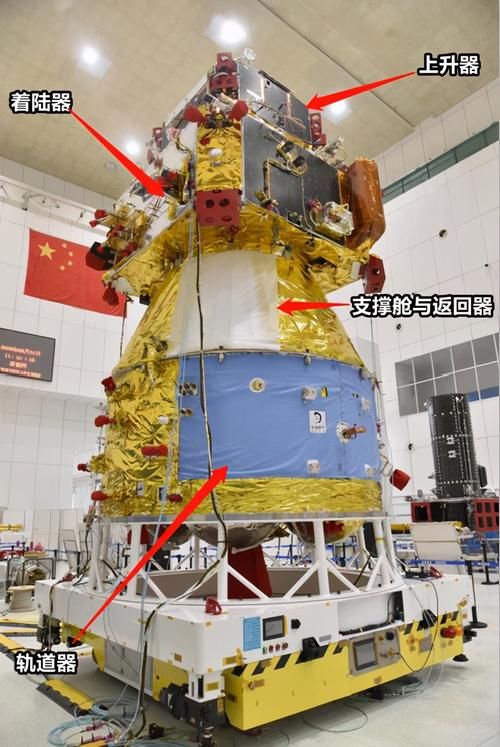
文章插图
嫦娥五号
正所谓一步赶不上步步赶不上,除了安全落月技术,大洋彼岸在深空轨道无人交会对接领域再一次落后于我们。
阿波罗飞船在整个任务行程中有两次交会对接,一次是地月转移轨道段指令舱与登月舱对接,一次是月面上升后上升级与指令舱对接,两次对接都需要宇航员肉眼观测并操控飞船对接,自主对接能力非常弱。
推荐阅读







- 龙飞船 SpaceX拿下三笔私人飞行订单,“龙飞船”或在2023年前飞往国际空间站
- 飞船 “太空快递员”不辱使命(筑梦“太空之家”——中国空间站建设记③)
- 关乎 天舟二号升空,中国空间站接单!为何货运飞船关乎空间站成败?
- 飞船 小雅带你看火箭|“我们很清楚成功总会到来”
- 光速 以光速飞行300万光年真需要300万年爱因斯坦飞船上的人根本感觉不到时间
- 太空飞船 宇宙没有空气,飞船为什么不能达到光速科学家无法触及的速度
- 飞船 只有12名宇航员成功登月,月球上为何有近187吨垃圾垃圾哪来的
- 科学家 飞船42年的航行,距地球182亿公里,传回的数据让科学家大失所望
- 机械臂 天舟二号货运飞船与天和核心舱完成太空之吻
- 飞船 选定3人飞往中国空间站!杨利伟正式投入训练:时刻准备着