7月4日 , 神舟十二号航天员乘组的两名航天员顺利完成出舱任务 。 这是自神舟七号任务翟志刚实现中国航天员首次出舱之后 , 时隔13年中国人再次实施出舱活动 , 也是中国空间站时代的首次航天员出舱 。 在这约7小时的时间里 , 中国航天员都完成了哪些重大任务 , 机械臂、舱外航天服等设备又是如何全力“托举”航天员本次出舱任务的呢?
文章图片
文章图片
空间站时代的首次出舱
“哇 , 这外边太漂亮了!”这是神舟十二号乘组航天员刘伯明在4日当天出舱后的一句感叹 , 而这句带有东北话味道的“金句”随着央视直播画面在互联网上刷屏 。
《环球时报》采访人员4日一早就赶赴北京航天飞行控制中心采访本次出舱任务 , 当采访人员在大屏幕上看到航天员开启舱门的一刻 , 心中感慨万千:中国人等待这一刻 , 等了13年!上次实现中国航天员出舱活动的首次突破 , 还要回溯到2008年的神舟七号任务 , 当时中国航天员翟志刚完成历史性突破 。
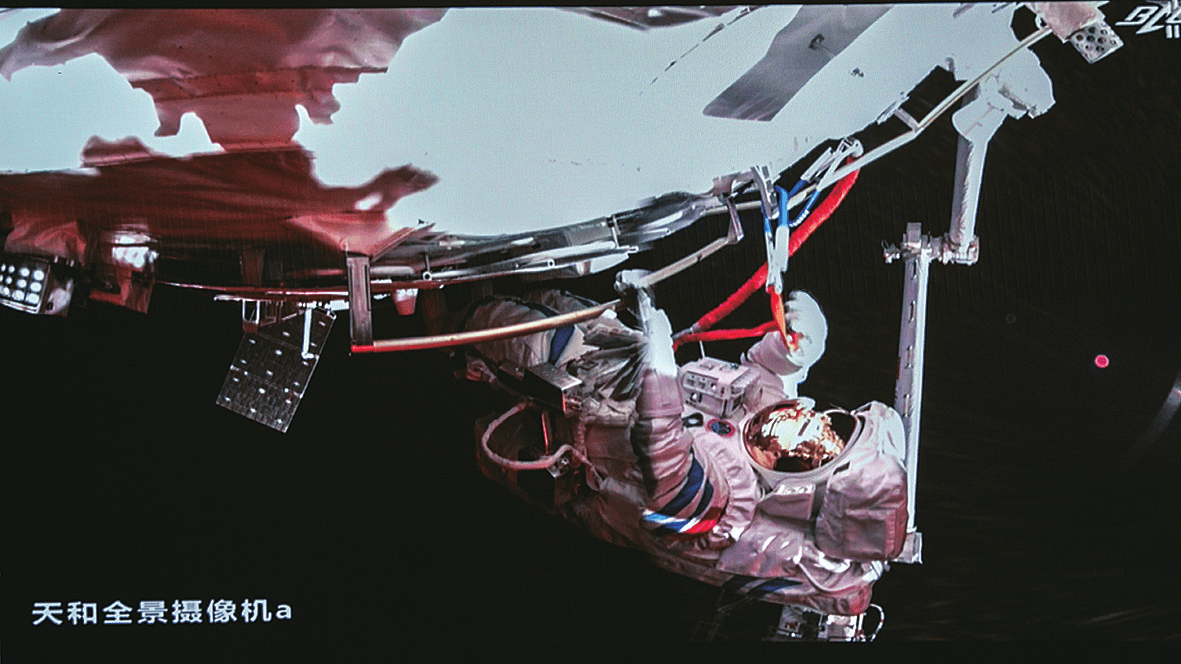
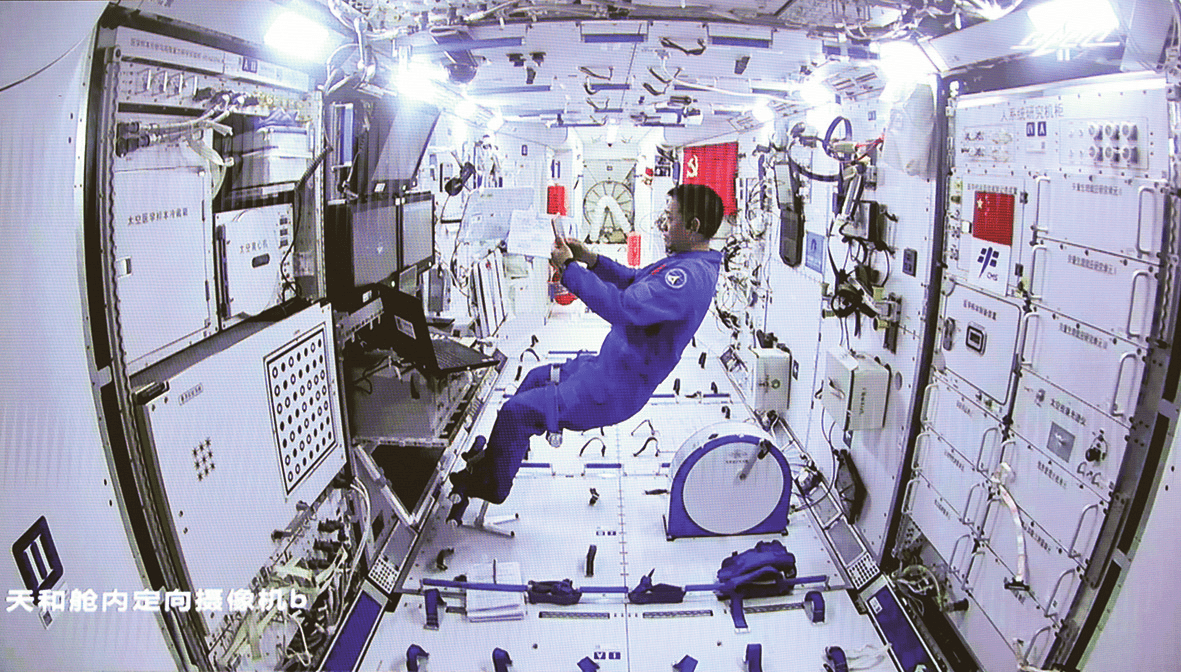
4日当天的这一组时刻注定是要被写进中国载人航天史与中国空间站发展史 。 北京时间2021年7月4日8时11分 , 航天员刘伯明成功开启天和核心舱节点舱出舱舱门 , 截至11时02分 , 航天员刘伯明、汤洪波身着中国自主研制的新一代“飞天”舱外航天服 , 已先后从天和核心舱节点舱成功出舱 , 并已完成在机械臂上安装脚限位器和舱外工作台等工作 , 之后又在机械臂支持下 , 相互配合开展空间站舱外有关设备组装等作业 。 北京时间12时09分 , 航天员刘伯明、汤洪波协同完成空间站舱外全景相机抬升操作 。 完成操作后 , 刘伯明把自己的头盔相机对准地球并解说:“现在有白云朵朵 , 还有成片的 , 像海洋一样的画面 。 现在 , 跟随我的步伐 , 一起自由地飞翔吧 。 ”其间 , 在舱内的航天员聂海胜配合支持两名出舱航天员开展舱外操作 。
据中国载人航天工程办公室消息 , 北京时间4日14时57分 , 经过约7小时的出舱活动 , 神舟十二号航天员乘组密切协同 , 圆满完成出舱活动期间全部既定任务 , 航天员刘伯明、汤洪波安全返回天和核心舱 , 标志着我国空间站阶段航天员首次出舱活动取得圆满成功 。 据了解 , 此次出舱活动 , 天地间大力协同、舱内外密切配合 , 圆满完成了舱外活动相关设备组装、全景相机抬升等任务 , 首次检验了我国新一代舱外航天服的功能性能 , 首次检验了航天员与机械臂协同工作的能力及出舱活动相关支持设备的可靠性与安全性 , 为空间站后续出舱活动的顺利实施奠定了重要基础 。
《环球时报》采访人员获悉 , 神舟十二号航天员乘组自6月17日进驻天和核心舱以来 , 按计划开展了各项工作 , 目前3名航天员状态良好 , 后续在轨飞行期间还将进行一次出舱活动 。
机械臂如何成为航天员“座驾”
【核心|创造历史!中国航天员出舱7小时完成了哪些重大任务?机械臂如何成“座驾”?】相比神舟七号的出舱方式 , 本次出舱任务中 , 空间站核心舱的机械臂首次托举航天员到指定位置 , 圆满完成出舱操作 , 因此它被媒体称为“航天员座驾” 。 这一目前同类航天产品中复杂度最高、规模最大、控制精度最高的空间智能机械系统到底如何深度参与到出舱任务的呢?
《环球时报》采访人员从空间站核心舱机械臂抓总研制单位——航天科技集团五院了解到 , 核心舱机械臂展开长度为10.2米 , 最多能承载25吨的重量 , 是空间站任务中的“大力士” , 主要承担舱段转位、航天员出舱活动、舱外货物搬运、舱外状态检查、舱外大型设备维护等八大类在轨任务 。
据介绍 , 空间站核心舱机械臂是我国首个可长期在太空轨道运行的机械臂 , 肩部设置了三个关节、肘部设置了一个关节、腕部设置了三个关节 , 一共七个关节 , 每个关节对应一个自由度 , 就如同人的手臂一般能自由活动 。 通过各个关节的旋转 , 它能实现自身前后左右任意角度与位置的抓取和操作 , 为航天员出舱顺利开展出舱任务提供强有力的保证 。 为扩大任务触及范围 , 空间站核心舱机械臂还具备“爬行”功能 。 据介绍 , 机械臂通过末端执行器与目标适配器对接与分离 , 同时配合各关节的联合运动 , 从而实现在舱体上的爬行转移 。
在这次的舱外行走中 , 机械臂又是如何发挥“座驾”作用呢?航天科技集团五院空间站系统总体副主任设计师汤溢介绍说 , 在舱外时 , 航天员处于失重状态 , 再加上舱外航天服的加压 , 活动起来十分不便 。 机械臂可以让航天员免去攀爬环节 , 为航天员节省最大体力 。 “最重要的是释放了双手 , 让航天员能干更加有意义的事儿 。 ”五院空间站系统副总师侯永青介绍:“我们做了一个叫脚限位器的 , 有点像咱们滑雪用的滑板 。 把它装在机械臂上 , 人站在上面 , 通过机械臂的爬行到指定位置 。 ”汤溢还透露:“脚限位器可以通过踮脚、左右脚用力实现前后、左右倾斜 。 ”
据《环球时报》采访人员了解 , 空间站机械臂是我国航天事业发展的新领域之一 , 研制单位在关键技术、原材料选用、制造工艺、适应空间站环境的长寿命设计等方面均作出了巨大的突破和创新 。 中国由此成为世界上第三个掌握大型空间机械臂核心技术并应用的国家 , 全部核心部件实现国产化 , 并形成多项国家空间机器人行业标准 , 引领空间智能装备的中国制造之路 。
“飞天”舱外航天服如何护佑航天员
本次出舱任务中的舱外航天服备受外界关注 。 就以首先出舱的刘伯明为例 , 他穿着中国“飞天”舱外航天服在舱外工作了数小时 , 一定程度上体现该舱外航天服的性能 。
据介绍 , 舱外航天服是一种微型载人航天器 , 既能满足航天员生命保障需求 , 又能实现舱外移动 。 此次用来执行出舱任务的舱外航天服高2米左右 , 科技含量比以前更高、关节更灵活、支持出舱时间也更久——从以前的4小时增加到8小时 。 航天服头盔上配有摄像机 , 可以全程记录航天员舱外操作过程 。 对比视频画面 , 可以发现与13年前出舱的神舟七号航天员有明显不同——此次出舱 , 航天员与舱体之间不再有电脐带连接 。 这是因为舱外航天服已实现供氧和温度、压力控制 , 减轻了航天员舱外活动的负担 , 使其活动范围更广、更灵活 。
相比实现我国航天员首次太空出舱任务的神舟七号任务 , 空间站任务中舱外服性能又有哪些改进呢?中国航天员科研训练中心航天服工程研究室主任、载人航天工程航天员系统副总设计师张万欣介绍 , 针对空间站任务出舱活动需求 , 这次任务使用的舱外服在“神七”舱外服研制的基础上 , 进行了三方面重要改进:一是改变了结构布局设计 , 二是提高了服装的寿命 , 三是提高了人服能力 。 总之 , 目前的空间站舱外航天服较第一代相比 , 具有使用时间更长、安全可靠性更高、机动灵活性更好、测试维修性更强的特点 。
另据专家介绍 , 身着舱外航天服的航天员还可以在出舱时使用核心舱内的WiFi 。 航天员在进驻核心舱第二天 , 就已建立起舱上WiFi环境 。 据航天科技集团五院空间站系统总体副主任设计师汤溢介绍 , 以空间站为中心 , 半径40米范围内的周边都可以共享“天和”网络 。 因此 , 舱外航天员的视频画面、话音通话、生理参数等数据都可以实时传输到舱内和地面 , 并且减少了有线设备的烦琐 , 使航天员活动更加灵活 。
来源:环球时报
推荐阅读







- 历史|科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 空间|(科技)科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 核心|中科大陈秀雄团队成功证明凯勒几何两大核心猜想,研究登上《美国数学会杂志》
- 技术|无锡东亭:智慧创造生活 科技点亮未来
- 领域|上海市电子信息产业“十四五”规划:以集成电路为核心先导
- 底层|上海:加强元宇宙底层核心技术基础能力前瞻研发
- IT|中国重汽:氢能源产品的核心布局和整车集成开发已经全面完成
- 刘思远|从1到100 这座“塔”不断创造中国航天奇迹
- IT|美国法国英国连创历史新高 世卫组织警告“感染海啸”到来
- 历史|河南五举措数字赋能 “活化”历史文化资源