技术|“铁蛋”遛后感:关于CyberDog仿生四足机器人的思考( 二 )
文章图片
神秘的小米机器人项目
那小米铁蛋是如何诞生的呢?
实际上 , 小米机器人项目成立于2020年10月 , 铁蛋就是由小米手机部、小爱同学、小米相机部 , 以及小米生态链和追觅科技共同立项开发(生态链公司) 。 除了小米手机产品的技术加持之外 , 它还用到了吸尘器和扫地机器人的技术 。
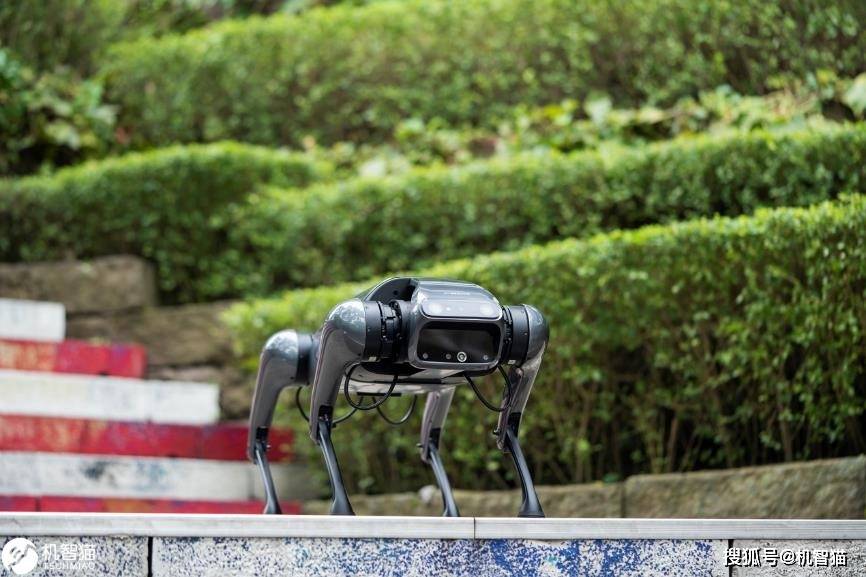
比如 , 让铁蛋完成这些复杂动作核心的伺服电机 , 每3个为一组 , 安装在铁蛋的“肩部”和“胯部” , 一共12个 , 分别控制铁蛋身体的俯仰倾斜和大腿小腿关节的运动 。 这种电机便和米家吸尘器是同款 , 最大输出功率达到了32Nm 。

文章图片
同时 , 铁蛋身上还用到了11个高精度传感器 , 包括触摸传感器、地磁传感器、AI交互相机、双目传感器、Intel RealSense D450深度摄像模组等等 。 这些传感器组成了铁蛋的眼睛和感知系统 , 让它能够像真实生物一样 , 看见和感觉到周边环境 。 自主跟随、避障等功能便是基于这些传感器实现的 。
要控制好这么多电机和传感器的协调运作 , 小米工程师给铁蛋加入了多种算法 , 比如自主跟随能力就是源自人脸识别技术的衍生 , SLAM建图和导航避障功能都来自影像技术延伸的视觉探知技术 , 这些技能都得益于小米在相机技术上的积累 。

文章图片
铁蛋的四只脚以及12个伺服电机 , 则在全志MR813芯片的控制下有序行动 , 确保它不会出现顺拐或者“扑街” 。
对于全志的这枚芯片 , 我们并不陌生 。 全志MR系列芯片已经在扫地机器人产品上被广泛应用 , 包括小米、石头、追觅等 , 本次铁蛋使用MR813也是复用追觅已经成熟的运动驱动模块 。
全志MR813芯片只能算“小脑” , 铁蛋的大脑应用了英伟达边缘AI超级计算机Jetson Xavier NX平台 , 它的AI算力达到21TOPS 。 当11组高性能传感器获取到的环境信息传到Jetson Xavier NX后 , 便会将运动信息通过千兆网口下发到MR813 , 由MR813进行电机运动的总控制 。 由此可见 , 铁蛋强大的大小脑算力 , 没有被完全发挥 。
文章图片
此外 , 围绕铁蛋还有一项争议 , 铁蛋是照搬了波士顿动力的开源技术吗?
事实上 , 这些国产机器狗确实用了开源技术 , 但并非波士顿动力 。 雷军在公开场合其实也很坦诚 , 铁蛋采用的是MIT Mini Cheetah以及ROS 2这样的开源方案 。 MIT Mini Cheetah是麻省理工学院的项目 , 也是世界首个能够完成后空翻的四足机器人 。
推荐阅读



- 快报|“他,是能成就导师的学生”
- 技术|“2”类医械有重大进展:神经介入产品井喷、基因测序弯道超车
- bug|这款小工具让你的Win10用上“Win11亚克力半透明菜单”
- 重大进展|“2”类医械有重大进展:神经介入产品井喷、基因测序弯道超车
- 历史|科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 空间|(科技)科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 精度|将建模速率提升10倍,消费级3D扫描仪Magic Swift在2021高交会大显“身手”
- 四平|智慧城市“奥斯卡”揭晓!祝贺柯桥客户荣获2021世界智慧城市治理大奖
- |南安市司法局“加减乘除” 打造最优法治营商环境
- 选型|数据架构选型必读:2021上半年数据库产品技术解析