审核专家:罗会仟
中国科学院物理研究所副研究员
“人类科学技术和生产力进步的根源 , 其实只有两个原因——好奇和懒” 。
懒得洗衣服就发明了洗衣机 , 懒得扫地则发明了吸尘器……
姑且不论这句话是不是正确 , 但有一件事情我们是需要承认的:科学技术的进步 , 确实让人类可以更方便地犯懒了 。
当人类连吸尘器都懒得拿的时候 , 新的犯懒工具出现了 , 这就是——扫地机器人 。
本文图片
来源丨网络
错了 , 是下面这张图 。
本文图片
来源丨电子发烧友
对于扫地机器人 , 很多用过的人表示真香 。 不过也有人说 , 这玩意儿基本就是智商税 。 到底真相如何 , 那么下面我们就来详细了解一下吧 。
1
扫地机器人的出现
严格来讲 , 世界上最早的扫地机器人是由瑞典的家电巨头Electrolux在1996年制造的 , 名字叫“三叶虫” 。 这个系列的扫地机器人现在仍然在生产 , 不过功能和外观已经跟96年那款完全不同了 。
本文图片
“三叶虫”扫地机器人 来源丨伊莱克斯官网
当时的扫地机器人功能很差 。 例如 , 跑到楼梯的时候根本不会自己停下 , 需要提前在楼梯和门口的位置贴上感应磁条 , 提醒机器人别往前走了 。
所以严格上说 , 第一代的“三叶虫”扫地机器人还真有点儿智商税 。
随着科技的进步 , 第二代、第三代的扫地机器人功能大大增强 , 同时也降低了成本 , 这才造就了今天扫地机器人能走进千家万户的局面 。
?2
扫地机器人的工作原理
扫地机器人的工作原理要从两部分讲起 。
第一部分就是如何清扫 。
如果我们将扫地机器人翻过来看一下 , 就比较容易懂了 。 扫地机器人的前方是两个小刷子 , 其范围通常要比机器人本身大一些 , 能把地上的东西扫到机器下边 , 再通过吸尘装置吸进体内 。
这两个小刷子通常是反向转动的 , 一个是顺时针 , 另一个是逆时针 , 两者同步旋转 。 这里就涉及到一个很简单的技术——带传动 。 在机器人内部有一个马达驱动旋转的轮子 , 轮子和另外两个不同位置齿轮咬合 , 马达旋转的时候 , 带动两个齿轮向相反的方向转动 。 齿轮上连接两根皮带 , 皮带的另一端则套在小刷子顶端 。 这样就实现了一个马达就让两个刷子同步反向转动 。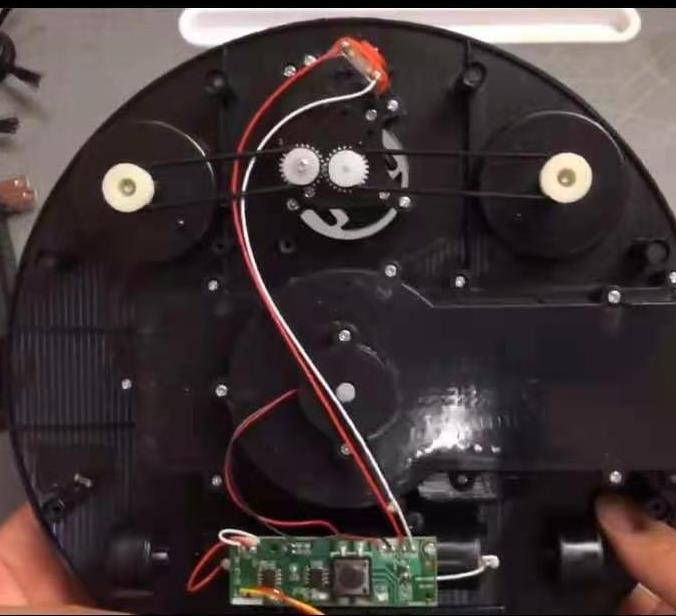
本文图片
来源丨电子发烧友
搞懂了如何清扫后 , 第二部分我们就要着重说一下扫地机器人究竟是如何自动行进和躲避障碍的 , 这里就不得不提到几个专门的技术名词了 。
首先要说到的就是碰撞感应器 , 就是扫地机器人正前方那个能微微活动的半圆 。 当机器人向前行进的时候撞到墙 , 感应器就能感觉到它是碰到了某些东西 , 然后向电路板传输信号 , 系统就会让扫地机器人向着被碰撞点以外的方向移动 。 而如果扫地机器人撞向墙角时 , 感应器就会同时有两个点碰触到墙 , 这时系统就会判定自己的位置在墙角 , 而指挥机器人向着相反的方向运动 。
本文图片
前端的半圆就是碰撞感应器 来源丨电子发烧友
不过仅仅依靠感应器根本就不够 , 因为家里的环境复杂 , 碰来碰去的就可能会把机器人搞懵了 , 所以就要用到其他的技术手段 。
这就是红外感应技术 , 这种技术大家并不陌生 。 无论是现实生活还是电影电视剧中 , 经常出现红外线探测的画面 , 其原理就是利用肉眼不可见的红外线反射 。 机器人上方有红外线发射器 , 下方则有感应器 。 发射出去的红外线遇到障碍物就会反射 , 在接收到反射回来的红外线后 , 系统就能根据两者时间差计算出周围障碍物的距离 , 从而有效地提前规避 。
本文图片
来源丨电子发烧友
另外 , 这种红外线功能不仅可以在水平方向上探测 , 还可以在垂直方向上探测 。 这就是机器人为什么一遇到楼梯和陡坡就会停下来 , 或者拐弯来避开 。
不过仅仅拥有这两种技术还是不够的 , 因为红外线探测器还是不能探测到体积太小的障碍物 , 而碰撞感应器碰到比较软的东西又无法触发 。
因此 , 就会出现早期扫地机器人推着宠物在房间里“干的好事”满屋乱跑 , “发粪涂墙”“发粪涂地”的故事……好吧 , 这就是个悲剧 。
本文图片
这场面太可怕 来源丨电子发烧友
所以 , 设计师们为了避免这种情况 , 就开始想着给扫地机器人加上眼睛 , 新一代的扫地机器人就利用了双目避障技术 。 这种技术顾名思义就好像人长着两只眼睛一样 , 扫地机器人上也安装了两个摄像头 。
人类的眼睛之所以能判断距离、大小、方位 , 主要就是依靠视差 。 对于视差 , 我们举个例子就容易弄懂了:在头部保持静止不动的情况下 , 在身体侧面放一件东西 , 然后分别闭上左眼和右眼进行观察 , 我们就会发现这东西的方向和位置发生了变化 。 人类的大脑其实就是根据这种视差 , 来判断具体距离和位置的 。
给扫地机器人安装了两个摄像头之后 , 其电脑系统就能模拟人眼的这种视差 , 来判断与前方物体的距离 。 这种能力不仅仅能识别物品的距离和位置 , 还能够通过AI和大数据来识别前面的阻挡物是什么 , 以避开地上的拖鞋、宝宝的玩具以及宠物的粪便等 。
本文图片
带有双目避障摄像头的扫地机器人 来源丨电子发烧友
同时 , 摄像头的存在还能够让主人通过手机的APP去直接去观察家里的情况 , 遥控扫地机器人的行动 。
了解了机器人到底是如何躲避障碍物 , 下一个问题就出现了 , 机器人是如何规划整个行动路线的呢?
本文图片
图片来源丨知乎
这就不得不提到一种叫做SLAM的技术 , 也就是同步定位与地图构建(Simultaneous localization and mapping) 。 这种技术通过红外线或激光传感器 , 扫描整个房间的大致情况 , 再对扫地机器人所行动过的路径进行记忆 。 计算机就可以导出一套房间的整体地图来 , 并通过一定的算法获得其自身的定位 , 继而指挥机器人进行移动 。
本文图片
也可能被猫直接指挥 来源丨网络
自动定位和地图构建的同时 , SLAM也提供了路线规划能力 。 一般带有拖地功能的扫地机器人 , 系统会指挥其呈Z字型循环往复的运动 。 通过这种形式先把没有遮挡的宽阔区域清扫干净后 , 再对边角地区和有遮挡物的地区集中清理 。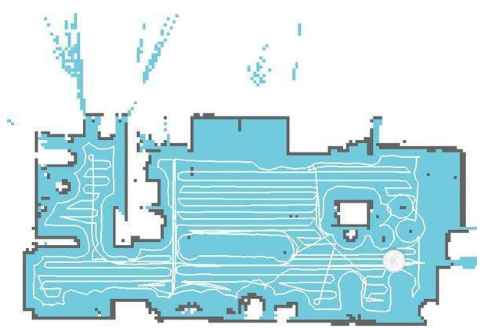
本文图片
扫地机器人的行进路线 来源丨电子发烧友
3
选择扫地机器人靠谱吗?
现在扫地机器人的技术一直在进步 , 技术的爆炸式发展使得机器人的功能更加完善 , 现在的大品牌扫地机器人已然具备了科幻片中才具备的自我识别和智能AI技术 。 清扫功能上也从只能扫地和吸尘 , 变成具备洗、吸、磨、烘干等能力的多功能一体机 。 这种技术全面的机器人 , 当然靠谱 。
所以 , 只要你需要就可以买 , 尤其是对于那些有宝宝或者养宠物的家庭 , 可以完美地解决地板上数不清的猫毛、狗毛等问题 , 还能保证孩子随便在干净的地面爬 。
本文图片
来源丨网络
当然 , 对于不爱干家务的人来说 , 扫地机器人也可以作为备选方案 。
那么 , 扫地机器人应该怎么选呢?
首先 , 看吸力 。 一般来说 , 吸力大吸尘能力也强 , 但是噪音也大 , 所以想要大吸力的要慎重选择 。 其实 , 对于日常清洁来说 , 1000pa~2000pa 的吸力就能满足 。
其次 , 看清洁配件 。 目前大部分扫地机器人采用的是“双边刷+中间滚刷”的设计 。 双边刷能尽可能覆盖较大面积 , 中间滚刷能将缝隙中的尘土搅出来 。 所以 , 想要彻底清洁 , 可以选择两者兼容的设计 。
第三 , 看智能水平 。 也就是我们前面提到的机器人躲避路障系统和规划行动路线系统的能力 , 可以根据自己的需求按照产品说明选购 。 需要注意的是 , 一些品牌声称采用“红外线导航、超声波导航、陀螺仪导航” , 但这几种导航并不完全靠谱 , 全靠随机碰撞 。
【机器人|扫地机器人,人工智能还是人工“智障”?】虽然扫地机器人越来越智能 , 但仍存在部分问题 。 随着科技的发展 , 相信未来的扫地机器人会有更全面的清扫功能以及更完美的智能系统 。 其实 , 某些品牌的扫地机器人 , 已经开发出了自动清洗尘盒的功能 。
也就是说 , 离彻底解放双手的日子不远了 。 对于小编这种懒人 , 这可真是福音 。 话不多说 , 我要去清理我家机器人的尘盒了~
来源:数字北京科学中心
编辑:tzy
推荐阅读







- 人物|马斯克谈特斯拉人形机器人:有性格 明年底或完成原型
- 硬件|Yukai推Amagami Ham Ham机器人:可模拟宠物咬指尖
- 人工智能|聚焦车载人工智能计算芯片研究 推进汽车产业高质量发展
- 王者|布局手术机器人赛道,谁是王者? | A股2022投资策略⑩
- 孙自法|中国科技馆“智能”展厅携多款机器人亮相 喜迎新年和人机共融时代
- 国际|微创血管介入手术机器人获国际创业大赛冠军,获价值千万元奖励
- 猎豹|数字化助力实体消费 机器人让商场“热”起来
- 机器人|微创血管介入手术机器人获国际创业大赛冠军,获价值千万元奖励
- 观众|中国科技馆“智能”展厅携多款机器人亮相
- 娱乐性|新华全媒+|探秘冬奥会“黑科技”:当冰壶遇上人工智能