
本文图片
马里亚纳海沟 , 地球最深处 。 要涉足这无人之境 , 人造机器若没有耐压的“盔甲” , 都会被强大水压所破坏 。 不过 , 在深海中生活的生物却因有着奇特构造而在这里安然无恙 。 若能由深海生物启发 , 把“生命之秘”化作“机器之力” , 研发能自适应复杂环境的智能机器 , 则既可助力深海探索 , 又能发展新型机器人与智能装备 。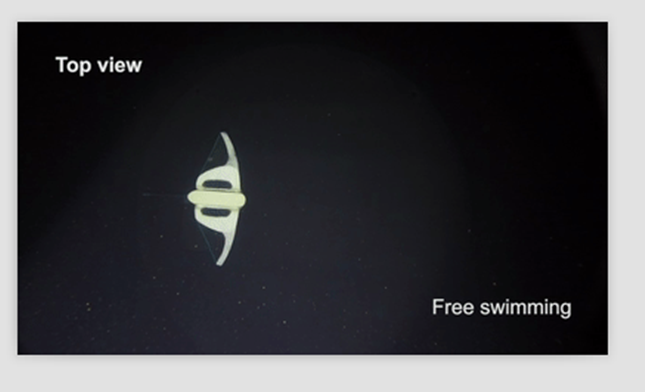
本文图片
▲马里亚纳海沟里的自动软机器人
浙江大学航空航天学院交叉力学中心李铁风教授团队联合之江实验室 , 与合作单位开展跨学科交叉研究 , 率先提出机电系统软-硬共融的压力适应原理 , 成功研制了无需耐压外壳的仿生软体智能机器人 , 首次实现了在万米深海自带能源软体人工肌肉驱控和软体机器人深海自主游动 。 这种环境自适应的仿生软体机器人和智能系统 , 将为深海探索科考、环境监测与资源勘探提供解决方案 , 为复杂环境与任务下机器人及智能系统设计提供新思路 。
由深海狮子鱼启发 , 适应110兆帕静水压
生物学研究发现 , 在马里亚纳海沟6000米到11000米之间的深度区域 , 仍有数百种物种生存 , 狮子鱼就是其中的一种 。 万米海底的压力有多大?
“在10900米的海底 , 静水压高约110兆帕 , 接近于1100个大气压 。 用一个不太恰当的比方 , 相当于一吨重的小汽车全压在指尖上 。 ”之江实验室研究人员李国瑞介绍 , 过去 , 需要高强度的金属外壳(如钛合金)或压力补偿系统来保护 , 才能克服深海的极高静水压 。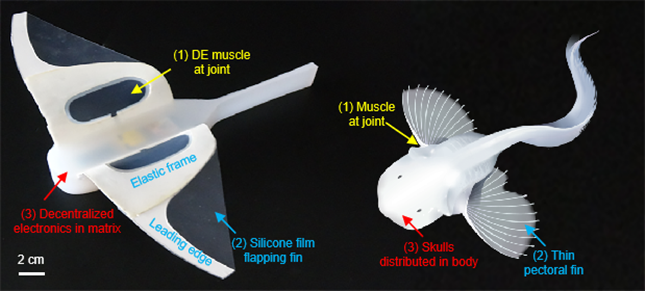
本文图片
▲仿生狮子鱼深海软体机器人
而浙江大学李铁风团队研制的仿生软体机器鱼 , 由软体人工肌肉驱动一对翅膀状的柔性胸鳍 , 通过节律性扑翅实现游动 。 控制电路、电池等硬质器件则被融入集成在凝胶状的软体机身中;通过设计调节器件和软体的材料与结构 , 实现了机器人无需耐压外壳 , 就可以承受万米级别的深海静水压力 。
【机器人|“海底1万米!” 浙大仿生软体智能机器鱼成功“打卡”马里亚纳海沟登《自然》封面】在现场看到 , 这款仿生软体智能机器鱼 , 形似一条深海狮子鱼 , 长22cm , 翼展宽度28cm , 大约为一张A4纸的长宽 。 科研团队如何实现适应超强压力而保持结构功能完整呢?“和传统的‘硬扛’方法不同 , 团队采用了‘以柔克刚’的策略 。 项目合作方中科院深海研究所何舜平团队在马里亚纳海沟捕获的深海狮子鱼样本 , 也为机器人的设计提供了仿生启发 。 ”李国瑞介绍 , 通过对深海狮子鱼的结构分析 , 团队发现深海狮子鱼的骨骼细碎状地分布在凝胶状柔软的身体中 , 有助于其在高压力环境下的生存与活动 。
因此 , 团队启发对电子器件和软基体的结构、材料进行力学设计 , 可以优化在高压环境下机器人体内的应力状态 , 从而使整个系统无需外壳保护即可适应高静水压力 。 “我们的研究目标就是以全新技术路线实现深潜器的小型化、柔性化、智能化 , 大幅降低深海探测的难度和成本 。 ”李铁风教授说 。
突破极限 , “软肌肉-智驱动”
如何让软体机器人智能驱动 , 这是浙江大学李铁风团队长期攻关的重要方向 。 采访人员在现场看到 , 机器鱼通过放大状的鱼鳍 , 像翅膀那样扇动向前推进 。 “要在深海中驱动 , 还需克服高分子材料在高压和低温时电驱动能力衰减的问题 。 ”李铁风教授介绍 , 团队与浙江大学化学工程与生物工程学院罗英武教授课题组合作研制了能适应深海低温、高压等极端环境的电驱动人工肌肉 , 在高压低温环境下依然能保持良好电驱动性能 , 即便是在马里亚纳海沟的低温(0~4℃)、高压环境(110 MPa)下依旧能正常工作 。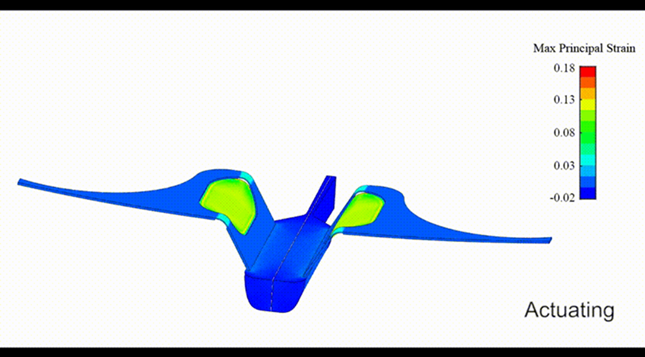
本文图片
▲驱动模拟
那么“翅膀”的扑动是怎么实现的呢?科研人员巧妙地利用了围绕在人工肌肉外的海水作为离子导电负极 , 由机器鱼自带能源在人工肌肉内外侧厚度方向产生电势差 , 让高分子薄膜发生舒张与收缩形变 , 这样一来“翅膀”就能上下拍动 , 推动机器鱼水中前行 。
“力学是一门古老而传统的学科 , 这个成果体现了交叉力学研究在多学科合作中的融合与桥梁作用 , 非常感谢不同学科背景和技术特长的成员们通力协作 。 ”李铁风教授介绍 , 此项研究除了浙大航空航天学院及之江实验室的科研力量外 , 浙大的机械学院、能源学院、化工学院、海洋学院和中科院深海研究所等多个研究团队都参与了该项目研究 。
探索无止境 , 鱼翔万米深渊
在研制过程中 , 团队通过大量的压力环境模拟实验来验证材料和结构的可行性 , 已经在实验环境下证明了机器人在深海、极地、高冲击性等恶劣及特种环境下 , 具有较好的发展应用前景 。 然而团队还是想以实地的海洋试验来验证整个系统和技术的高可靠性 。
2019年12月 , 仿生软体机器鱼首次成功在马里亚纳海沟坐底 , 机器鱼随深海着陆器下潜到约10900米的海底后 , 在2500毫安时单节锂电池的驱动下 , 按照预定指令拍动翅膀 , 扑翼运动长达45分钟 , 成功实现了电驱动软体机器鱼的深海驱动 。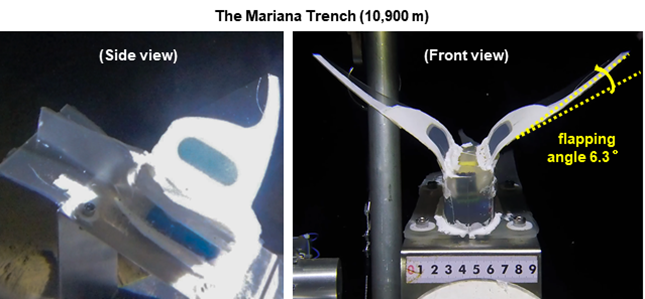
本文图片
▲马里亚纳海沟10900米深海驱动试验
2020年团队克服了新冠疫情和极端恶劣天气影响 , 进行了多次海试 。 在一次深海游动试验中 , 团队为避开超强台风在南海上漂了多天 , 参加此次海试的李国瑞和陈祥平说 , 夜里海况条件突然转好 , 他们就在凌晨的时间窗口时分开始了紧张实验 。 “凌晨三点钟 , 我们在主控室里 , 一分一秒地等待机器鱼在海底启动 。 当看到成功完成预定游动时 , 悬着的心终于放了下来 , 数年的艰难探索取得了里程碑式进展 。 ”李国瑞说 , 海试让技术从实验室更快地走向实用 。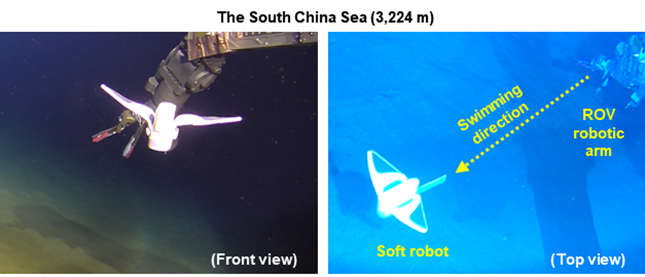
本文图片
▲南海3224米深海游动试验
论文审稿人认为 , 该工作会很大程度推进深海机器人的研究进展 。 李铁风介绍 , 这项研究为深海探测作业、环境的观察和深海生物的科考提供了新的解决方案 , 有望大幅提升深海智能装备和机器人的应用能力 , 让柔性智能设备从常规环境走向深海作业等多样任务与复杂场景 , 又迈出了坚实的一步 。
本文图片
据了解 , 这项研究成果于3月4日 , 作为封面文章刊发在国际顶级期刊《自然》 。 之江实验室研究人员李国瑞 , 浙江大学博士研究生陈祥平、周方浩为论文共同第一作者 , 通讯作者为浙江大学李铁风教授 。 该研究获国家自然科学基金共融机器人重大研究计划、国家重点研发计划支持 。 论文链接:https://www.nature.com/articles/s41586-020-03153-z
作者:刘海波 吴雅兰 柯溢能
图片: 卢绍庆 部分图片由课题组提供
编辑:付鑫鑫
责任编辑:蒋萍
*文汇独家稿件 , 转载请注明出处 。
推荐阅读







- 快报|“他,是能成就导师的学生”
- 技术|“2”类医械有重大进展:神经介入产品井喷、基因测序弯道超车
- bug|这款小工具让你的Win10用上“Win11亚克力半透明菜单”
- 重大进展|“2”类医械有重大进展:神经介入产品井喷、基因测序弯道超车
- 历史|科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 空间|(科技)科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 精度|将建模速率提升10倍,消费级3D扫描仪Magic Swift在2021高交会大显“身手”
- 人物|马斯克谈特斯拉人形机器人:有性格 明年底或完成原型
- 四平|智慧城市“奥斯卡”揭晓!祝贺柯桥客户荣获2021世界智慧城市治理大奖
- |南安市司法局“加减乘除” 打造最优法治营商环境