【环球网智能综合报道】2020年 , 5G网络建设开始驶入快车道 。 同年第十一届上海移动宽带论坛上 , 华为提出了 “1+N” 5G目标网 。 开启5G 未来黄金十年之路 , 需要全频谱走向 5G , 构筑 1 个普遍覆盖的宽管道、N维能力按需叠加的极简目标网络 。 在走向1+N目标网的过程中 , 也存在着诸多挑战 , 如toB多维能力如何按需部署 , 2/3/4/5G多制式运维效率如何提升等 。 移动网络走向自动驾驶 , 是5G时代应对运维复杂度提升的最佳途径 。 “分层自治、垂直协同”架构是实现无线自动驾驶网络的基石 , 场景化开放则是1+N网络迈向自动驾驶的必经之路 。 “分层自治、垂直协同”架构是实现无线网络自动驾驶的基石
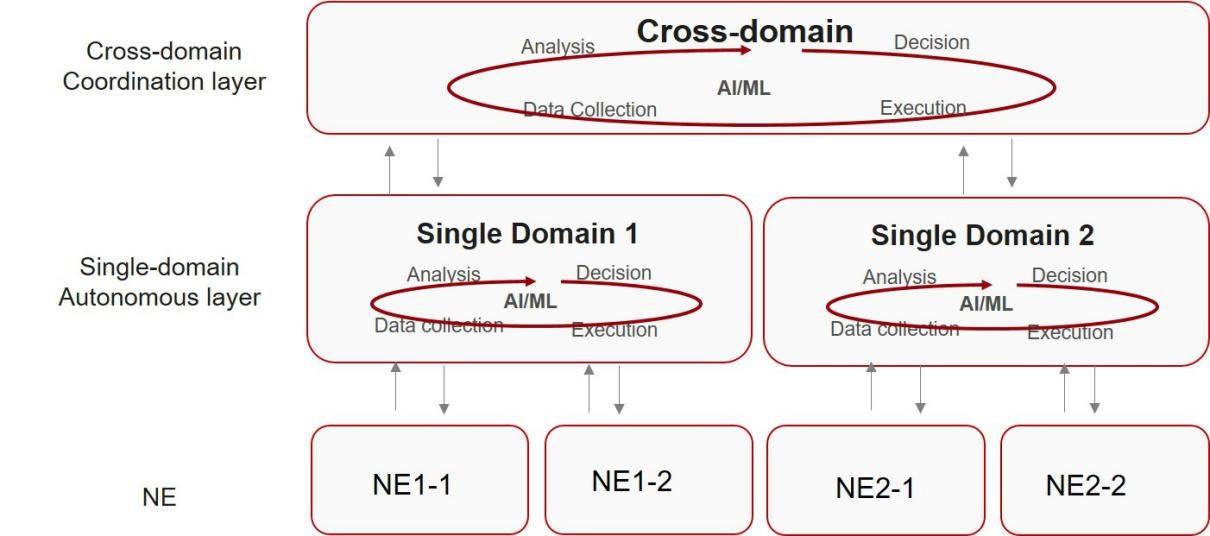
目前产业的主流观点认为 , 完全智能自治网络会逐步分级实现 , 为了降低网络运维的复杂性 , 要在架构上通过分层实现 , 即基于“分层分域自治、垂直跨域协同”的开放架构实现无线网络自动驾驶 。 华为移动网络自动化引擎iMaster MAE就是基于此开放架构实现上下协同 , 并助力构建5G网络自动驾驶能力和生态 。 这个架构包含跨域协同层、单域自治层和网元层 , 在不同层次之间 , 例如跨域闭环和各单域闭环之间 , 通过开放接口(开放API、SDK等)完成相互协同和信息交互 。 在自动驾驶网络不断向更高级演进的过程中 , 如何通过这些开放接口更高效更简单的开放网络原子能力 , 实现移动网络上下层协同 , 成为迈向自动驾驶网络所必须回答的问题 。
文章图片
那么怎样才是高效协同该有的样子呢?无线网络传统意义上的网管系统也有面向上层系统的北向接口 。 系统与系统之间交互的是各种配置、性能、故障等原始数据 。 数据量大 , 服务接口复杂是实现跨域协同的痛点 , 是迈向自动驾驶网络需要跨越的鸿沟 。
解决复杂性的方法是在跨域和单域系统之间构建一层场景化的接口 , 将原始数据和复杂的指令 , 转换成具有功能意义的场景化原子能力 。 上层系统通过它来调用下层各域的原子能力 , 从而减少大量重复的数据处理工作量 。 就像搭建乐高积木 , 搭建者面对的不再是一堆小颗粒积木 , 而是针对不同搭建场景的标准化积木模块 。 用户可以根据自己的需求选择合适的模块快速完成搭建 。 这能极大的提升搭建效率 , 也在一定程度上满足了搭建者的个性化需求 , 让跨域协同变得更加高效和简单 。
文章图片
分层次最终实现意图开放 , 铺就迈向完全自动驾驶网络之路
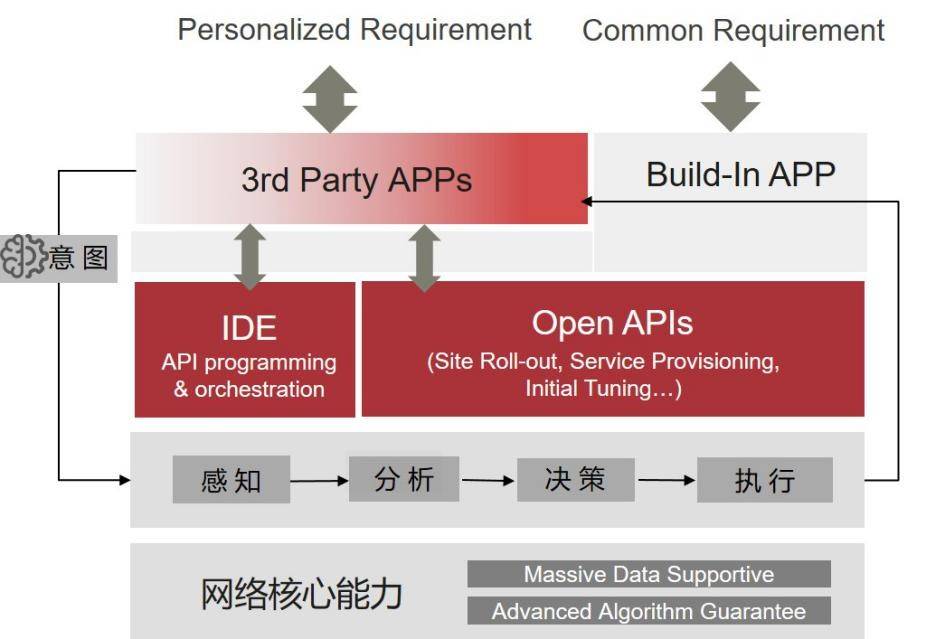
但是正如自动驾驶网络不会在一日实现 , 网络能力的开放也是层层递进的 。 面向自动驾驶网络阶段不同 , iMaster MAE开放的内容不同 , 可以逐级分为原子API开放、场景API开放和意图API开放 。 上层系统可以通过独立调用和组合调用这些API , 充分个性化使用场景 。
原子API开放:下层网管系统可以将告警数据、话统数据、测量数据等通过原子API开放给上层NMS , 运营商能够提取这些数据中的有用信息 , 开发出自己需要的应用 。
场景API开放:与原子API开放不同的是 , 场景API开放的是针对运营商工作流中“规划”、“建设”、“维护”、“优化”、“运营”各阶段的原子能力 。 在此基础上 , 运营商还可以基于平台上的场景化API生态实现DevOps敏捷开发 , 定制最适合自己的运维自动化APP 。 以站点部署场景为例 , 部署环节的数据采集能力、网络设计能力、数据制作能力、数据激活能力、工程调测能力、和网络验收等原子能力 , 都能够通过场景API开放给上层系统 。 运营商通过上层系统按需调用这些原子能力 , 并定制开发匹配具体场景的开站流程 , 减少传统开站流程中的近十余次的人工断点和多次人工交互沟通 。 通过自动化能力打通端到端的流程 , 提高开站效率 。
在枫叶之国 , iMaster MAE通过场景化开放与运营商上层NMS系统无缝对接与协同 , 配合硬件的自动检测与识别 , 结合全球站点部署的专家经验 , 部署效率提升50%以上 , 实现了高效高质的5G站点部署 。
意图API开放:以上所提到的站点自动部署的案例 , 大致是介于L2到L3之间的网络自动化能力 。 随着自动化层级的不断提升 , 自动化运维场景的泛化性就越强 , 处理问题的范围就越广 。 根本上来说 , 就是需要让跨系统、跨领域之间的协同更加简单、更加高效 。 通过意图API , 上层系统将不再只是向下层网管系统调用“规建维优营”等各阶段的原子能力 , 而将能够调用网络建设和运营各阶段各域的应用APP来匹配业务意图需求 。 建立在这样极简意图开放基础上的智能自治网络 , 是自动驾驶网络所追求的终极目标 。
5GtoB业务场景下的运维自动化 , 对意图开放的需求十分迫切 。 对产业用户来说 , 他希望只需要表达 “我有个机器视觉业务要开通 , 包含30个摄像头”这样的意图 , 并传递给下层系统 , 下层系统就可以生成相应的配置文件 , 并自动解决网络中资源和策略冲突 。 这样的“意图”化接口 , 能够快速的捕捉运营商上层系统的意图 , 自动转换成对网络的需求 。 这可以极大的推动跨域自动化能力 , 加速业务创新和新业务的发放 。 并将助力建设高可靠5GtoB网络 , 提升保障面向行业的数字化业务体验(SLA)的能力 。
【架构|“分层自治、垂直协同”架构是实现无线自动驾驶网络的基石】基于原子/场景/意图的开放 , 能层层递进地封装和降低单域/单层的复杂性 。 进而让跨域垂直协同逐步走向极简和高效 , 最终加速移动网络迈向真正的自动驾驶 。 它也将促进运营商和产业伙伴的联合开放创新 , 驱动运维系统真正融入到运营商的商业流 , 助力运营商商业成功 。
推荐阅读







- 快报|“他,是能成就导师的学生”
- 技术|“2”类医械有重大进展:神经介入产品井喷、基因测序弯道超车
- bug|这款小工具让你的Win10用上“Win11亚克力半透明菜单”
- 重大进展|“2”类医械有重大进展:神经介入产品井喷、基因测序弯道超车
- 历史|科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 空间|(科技)科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 精度|将建模速率提升10倍,消费级3D扫描仪Magic Swift在2021高交会大显“身手”
- 四平|智慧城市“奥斯卡”揭晓!祝贺柯桥客户荣获2021世界智慧城市治理大奖
- |南安市司法局“加减乘除” 打造最优法治营商环境
- 选型|数据架构选型必读:2021上半年数据库产品技术解析