【外星人|灵活度逆天的中国空间站机械臂,能爬能走。还能抓取其他航天器?】
文章图片

文章图片
文章图片

文章图片
文章图片

文章图片

文章图片
文章图片
【温馨提示】正文字数:1500字 阅读时常:3分钟
近来和身边的朋友闲聊时 , 有朋友说我们的机械臂可以随意抓取其他航天器如何如何 , 听后莞尔一笑 , 随他自由发挥 。随后就想着写一篇文章详解我国的机械臂如何完成逆天的爬行 , 又有哪些强大的能力 , 顺便帮他科普一下我国的机械臂是不是能随意抓取其他航天器 。
机械臂参数
首先看下我们的的机械臂与同行的数据对比
指标中其他都很好理解 , 我们重点关注下自由度这个指标 。 (目前掌握7自由度机械臂的国家屈指可数)
不少对自由度的解释感觉都不是很亲近 , 不容易理解 , 比如物理学上的定义:完全确定一个物体在空间位置所需要的独立坐标的数目 , 叫做这个物体的自由度 , 是不是很难结合到我们的机械臂上?我想用我的方式给大家说说 , 当然我的用词不是很严谨 , 只是为了方便大家理解 。
那什么是自由度呢?可以以我们的胳膊来举例说明 , 小臂和大臂的关节就算一个自由度 , 手指的关节也可以算一个自由度 , 他们的共性是只有一对可以移动的方向 。 而手腕处的关节既能左右旋转还能上下摆动那就是两个自由度 。 如果每个关节只有一对可移动的方向 , 那总的自由度就是关节总数 。 如果其中某个关节有多对可移动的方向那有几对就算几个自由度 。
自由度越多 , 机械臂的活动越灵活 , 那为什么是7呢?为什么不是更少或者更多呢?从大自然中找到了答案 , 自然界中最复杂的生物躯体就是7个自由度 , 我们的胳膊也是7个自由度 , 不得不说造物主的神奇 , 总是造出最适合 , 最省力的结构 。 7个自由度也是机械臂末端能保持在三维空间中一点 , 且后端可以自由变形的最小数字 。
有很多机器人方面的研究证实 , 自由度越高机械臂的刚性越差 , 且出故障的几率也越高 。 7是事实上最合适的选择 , 不知道上帝造物时是不是参考了这个研究 。
逆天的爬行
那我们的机械臂是如何实现在空间站上爬行的呢?这个操作是由机械臂末端与空间站舱段不同部位的目标适配器相结合实现的 , 机械臂两端都有用于结合的末端 , 所以可以自由爬行 。
至于机械臂末端和舱段上的目标适配器是如何结合的 , 我们具体看看这两个部件 。
机械臂的末端中间是一个圆形 , 边缘均匀分布三个豁口 , 内部还有一个更小的圆孔 , 在大圆和小圆之间有三条钢丝 。 大圆的外部是四个耳状部件 , 在其中两个耳朵中还有一个摄像头 。
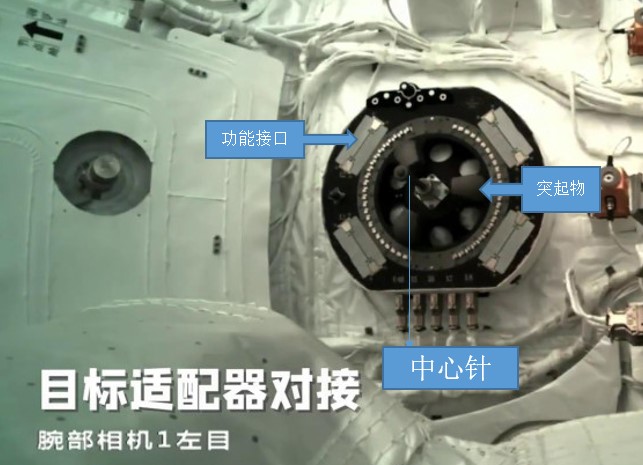
再看看目标适配器 , 正中间有一根凸起的针 , 这是中心捕获针 , 其周围成品字状分布三个突起物 。 再往外是4个长方形的白色接口(用于传输电力、视频、方位信息等等) 。
对接时 , 目标适配器中心的捕获针插入末端小圆孔 , 末端内的三条钢丝向内旋转收拢将捕获针稳稳的拉住并定位到正中心并拉向适配器内部 , 直到目标适配器表面和机械臂末端接触 , 而后四个白色接口与机械臂末端的四个耳状部件完成对接 , 待对接完成后目标适配器的三个凸起物与机械臂末端的三个豁口牢牢卡住 。 这就完成了整个对接工作 。
推荐阅读







- 揭秘陶乐德事件:男子在拘留室离奇消失,难道平行时空真的存在?
- 青藏高原将停止增高,后果不可承受,我们却未感到危机
- 关于鹦鹉螺的知识,造型可爱的‘活化石’
- 寻求气候变化的确定性:要多少才足够?
- “九星连珠”后地球会怎样?科学家已测出时间,距上次刚好1000年
- 少见!今年十五的月亮,不是十六圆
- 科学家在大型强子对撞机上寻找难以捉摸的基本粒子
- 地球的岩石,和月球的岩石有相同之处吗?
- ?了解更多关于俘获离子量子计算的详细信息
- 地球果真出了大问题?火山爆发后出现神秘现象,科学家紧急发声