条件 “嫦娥五号”任务:复杂多目标条件下的测控支持『太空科普』( 二 )

文章插图
图5 远望5号航天测量船和库鲁站15m X频段测控设备
确保着上组合体与轨返组合体分离后的双目标可靠测控
在环月飞行段着上组合体与轨返组合体实现两两分离后,需要确保对着上组合体和轨返组合体双目标的同时测控。
为了满足这一需求,统筹考虑两个组合体目标的测定轨精度和遥控指令上注要求,对可用测控资源进行了合理调配:由佳木斯深空站66m、喀什深空站35m和阿根廷深空站35m三套深空测控设备(如图6所示)承担对着上组合体的X频段测控任务;由青岛站、喀什站和纳米比亚站三套18m测控设备(如图7所示)承担对轨返组合体的X频段测控任务;VLBI测轨分系统(分布如图8所示)在该阶段的观测目标为着上组合体。VLBI具有较高的测角精度,对航天器横向的位置和速度有较好的约束,通过与测距、测速等外测数据相结合,可有效提高环月飞行目标的定轨精度,从而确保着上组合体两次变轨的测定轨精度。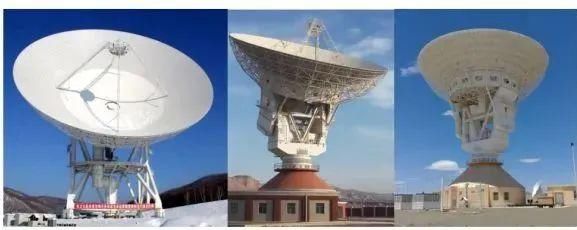
文章插图
图5 佳木斯深空站66m、喀什深空站35m和阿根廷深空站35m深空测控设备
文章插图
图6 青岛站、喀什站和纳米比亚站18m测控设备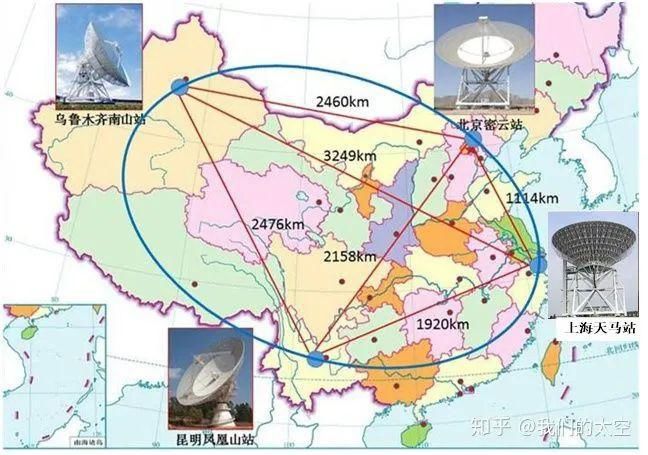
文章插图
图8 VLBI测轨分系统观测站分布
确保着陆下降段和月面上升段轨迹监视
为了能够实时监视着上组合体的下降轨迹,以及上升器的月面起飞过程轨迹,通过采用多站三向测量技术来实现对动力下降和月面起飞过程的实时几何定位。
参加三向测量的测站包括佳木斯深空站、喀什深空站和三亚站:佳木斯深空站作为主站发送上行载波及测距信号并接收,测得双向距离和、双向多普勒;三亚站和喀什深空站作为副站,接收佳木斯发送的上行信号,测得三向距离和、三向多普勒(在测控领域,A站发A站收称为双向测量,A站发B站收称为三向测量),如图9所示。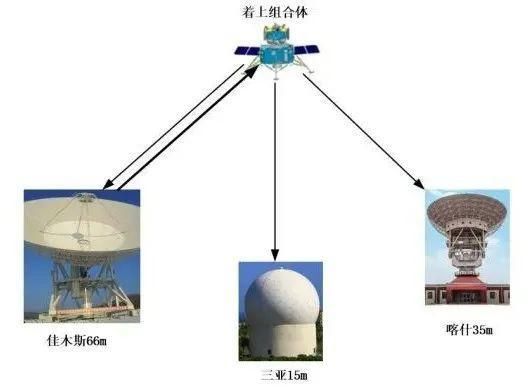
文章插图
图9对着上组合体的三向测量示意图
确保交会对接段高精度远程导引
在关键的交会对接段,测控系统需要利用有限的测控资源确保上升器和轨返组合体各自的测定轨精度。
【 条件|“嫦娥五号”任务:复杂多目标条件下的测控支持『太空科普』】“嫦娥五号”任务的交会对接是上升器作为目标,靠轨返组合体主动对接上升器,因此对上升器的测定轨精度要求更为迫切。为了满足上述要求,在上升器月面上升后,3个深空站和VLBI测轨分系统将全部用来跟踪上升器,而3个18m全部用来跟踪轨道器,这种测站资源分配方式可以满足交会对接段远程导引交班点定轨精度要求(轨返组合体和上升器相距50km处为交班点,在此之前为远程导引段,需要依靠地基测控保证;在此之后为近程导引段,由探测器自主完成交会对接)。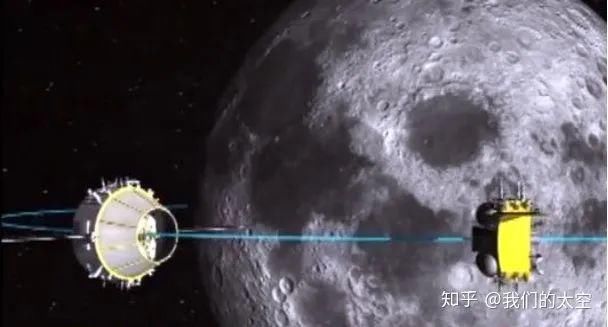
文章插图
图10 月球轨道交会对接示意图
确保返回器准确进入返回走廊
轨道器与返回器分离前,需要精确确定轨返组合体的飞行轨道,从而确保返回器导航初值注入的精度,测控系统设计了三站接力测量的方式,利用阿根廷35m深空站、国际联网的欧空局玛斯帕拉玛斯15m站和纳米比亚18m站对轨返组合体分时接力进行双向测距测速,从而满足轨道精确测量需求。
三站接力的含义就是将3小时的测控弧段均匀分配给上述3个测控站,利用三个测站的三角几何状分布(如图所示11),在时间域上实现测量几何的有效改善,使得定轨精度大大优于单站持续跟踪3小时。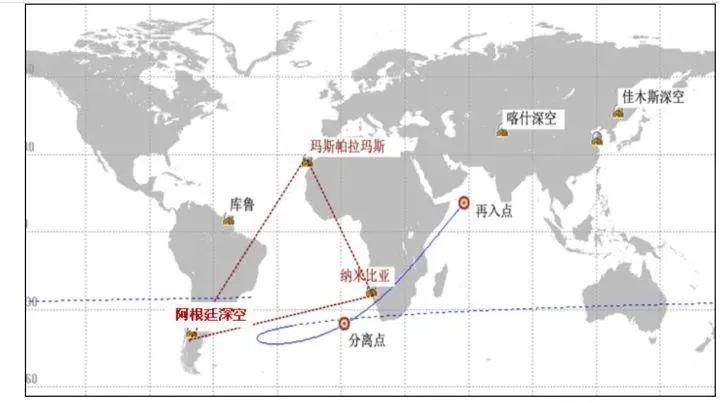
文章插图
图11 三站接力测量示意图
确保返回器再入过程的连续测量
对返回器再入过程的连续跟踪测量,是确保实现对返回器顺利回收的关键。
首先,未来确保返回器在第一次入黑障前的遥测接收并获取返回器一次再入最低点的外测数据,在索马里以东的印度洋海域布设了航天测量船,利用光学测量、雷达测量获取一次再入过程的飞行轨迹。考虑到返回器一次出黑障后的弹道可能的散布范围较大,在卡拉奇站布设了宽波束引导设备和在西藏阿里地区布设了车载多波束设备负责返回器一次出黑障后的捕获跟踪。卡拉奇宽波束引导设备的捕获范围达到了18°,车载多波束设备的捕获范围达到了20°,均能够覆盖返回器正常弹道偏差下的散布范围。
推荐阅读







- 交付 沉了!这艘刚交付的“新”船只跑了3次!船东将遭起诉和高额索赔
- 速度 宇宙中比光速更快的四种“速度”,你都知道几个
- 云南花25亿建“假古镇”,如今遭人“嫌弃”,当地人:不会再去
- 油价 “负油价”后全球市场变化!美国每升不足2元,中国排名竟超国足
- 太空飞行 鱿鱼宝宝和“水熊”将成为美国宇航局最新的微型宇航员
- 外延片 “江西造”登陆火星!
- 主播 闻“象”而动的直播歪风必须狠刹
- 古镇 四川一“避暑古镇”火了,距成都仅22公里,游客:来得值
- 伺服 “窝工”技术又双叒叕助力中国“太空首单”
- 视点·观察 充值App能和住同一家酒店的女性私聊?然而对方是“虚拟女性”